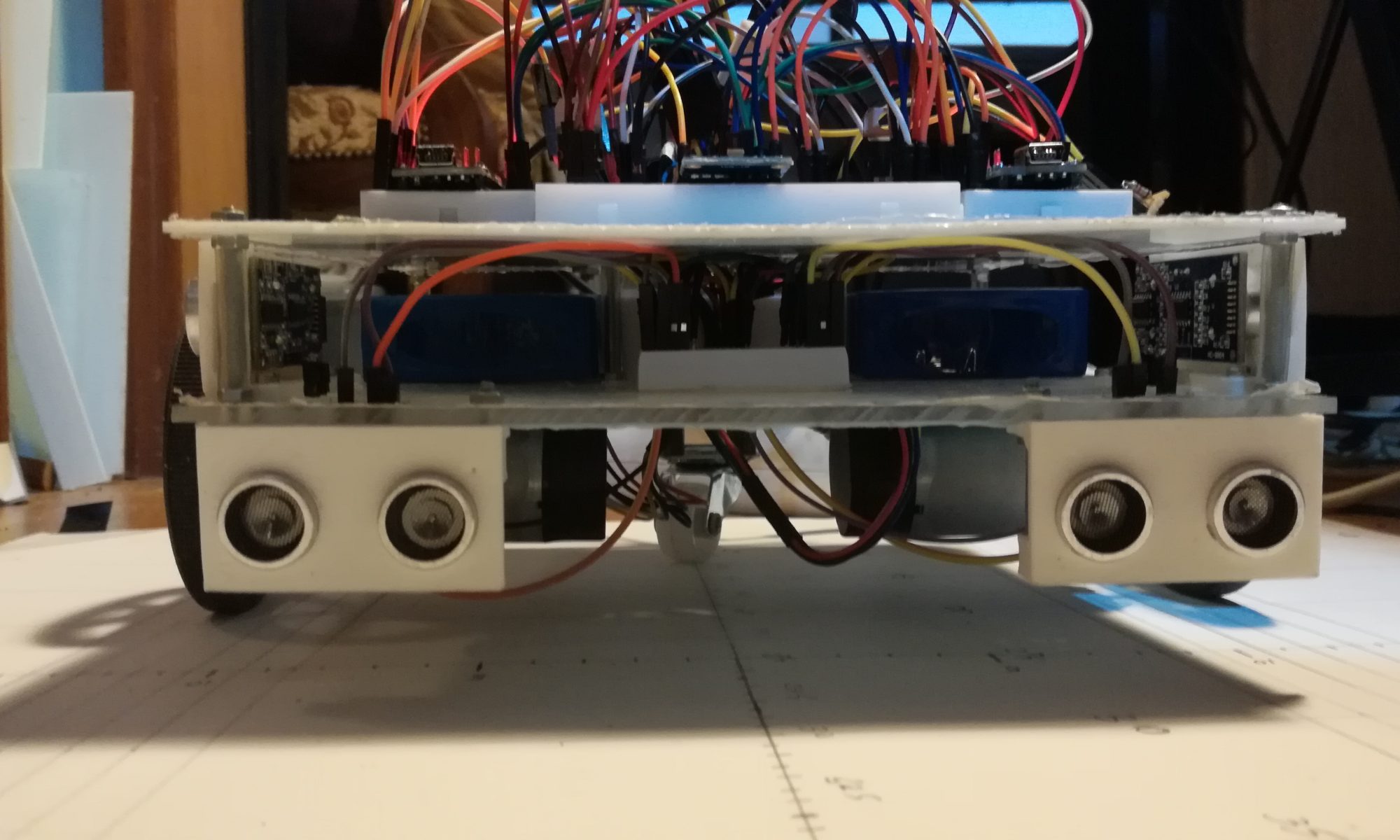
Os sonares, como por exemplo o sonar HC-SR04, podem ser usados nos robots autonomos para detestar os obstáculos no seu caminho e assim evitar colidir com eles. Para isso é necessário saber como funcionam e se comportam de modo a poder desenhar uma solução capaz de detectar todos os obstaculos presentes na trajectória do robot e …
Detecção de obstaculos com sonares fixos