IMX219-83 based Binocular Stereo Camera, with 8MP for AI and Depth Vision. 8 Megapixels (per camera) Sensor: Sony IMX219 Resolution: 3280 × 2464 (per camera) Lens specifications: CMOS size: 1/4inch Focal Length: 2.6mm Angle of View: 83/73/50 degree (diagonal/horizontal/vertical) Distortion: <1% Baseline Length: 60mm IMU ICM20948: Accelerometer: Resolution: 16-bit Measuring Range (configurable): ±2, …
Jetson nano 4G, com o tensorflow 2.5.0 cuda gpu
Depois de ter conseguido efetuar no Jetson nano de 2G, uma instalação do tensorflow 2.5.0 com o cuda gpu que passou o teste mais básico, vou tentar efetuar a mesma configuração nesta maquina. A configuração foi feita de acordo com o seguinte artigo no forum da nvidia: https://forums.developer.nvidia.com/t/official-tensorflow-for-jetson-nano/71770 O sintoma de mau funcionamento era o mesmo. …
Continuar a ler “Jetson nano 4G, com o tensorflow 2.5.0 cuda gpu”
STM32F bluepill, Platformio, Roger Clark arduino stm32 core & stm32duino bootloader
Este artigo é sobre o uso conjunto do seguinte conjunto de hardware e software and basic config. STM32F103C8, the Bluepill IDE, vscode/platformio, ststm32 with arduino framework Arduino_STM32 Core (roger clark melbourne core, maple core) STM32duino-bootloader Instalar o STM32duino-bootloader Ver outro artigo…. Depois de instalar o STM32duino-bootloader deixa de ser possível de usar a serial …
stm32f103c8 on platformio with serial FTDI, simple blink test
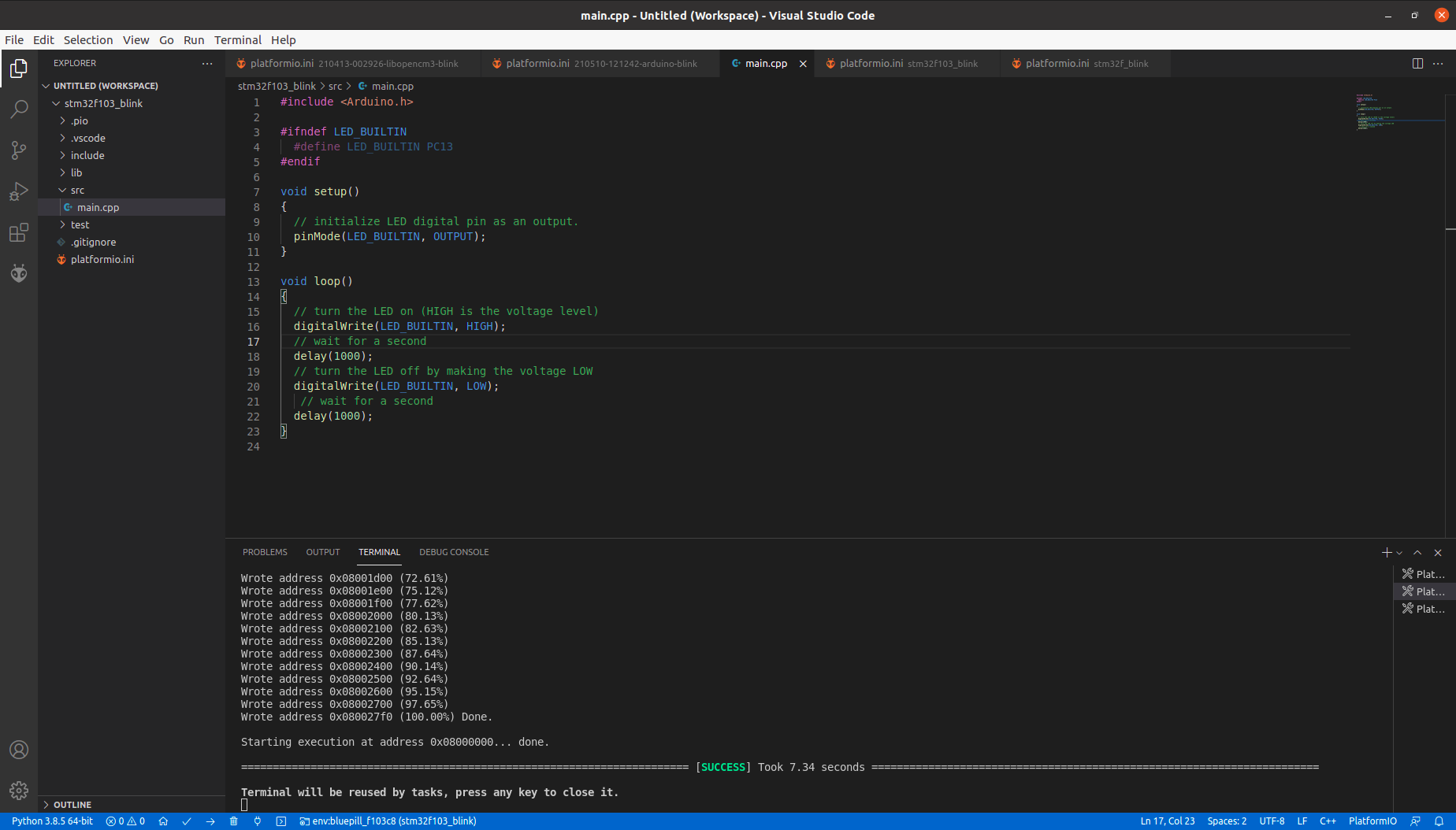
This is about testing an stm32f103c8 on platformio with a blink program. Connect the STM32F to theFTDI usb to serial interface Connect the STM32F to the computer with an FTDI usb to serial interface. STM32F ###### FTDI PIN A09 (TX) – PIN RX PIN A10 (RX)-PIN TX PIN 5V -PIN VCC PIN G -PIN …
Continuar a ler “stm32f103c8 on platformio with serial FTDI, simple blink test”
Motores DC com enconder simples

Motor com a referencia 625500/C DC geared motor with encoder Rated voltage: DC 12V No-load current: 50mA Stall current: 1A No-load speed: 64 rpm Suitable voltage: 6-12V (32-64 rpm) Reduction ratio: 1:110 Weight: 74 grams The output shaft of the geared motor rotates 220 turns to output 220 complete pulses. Pin Definition: 1. Hall power …
Instalar o micropython no ESP32-CAM
O procedimento para instalar o MicroPython no ESP32-CAM é igual a tosos os ESP32, e é fácil e rápido. A instalação do MicroPython no ESP32-CAM é efectuada pelo upload do firmware. É um procedimento, mesmo incluindo a preparação, é fácil e rápido. Na preparação devemos assegurar o descrito no seguintes pontos. Preparar o hardware Ligar o …
atmel SAMD21 cortex M0 MCU board
Comprei há uns tempos duas boards mini com o mcu atmel SAMD21 m0. Chegou a altura de as experimentar e ver como funcionam. Exemplo board SAMD21 M0 Mini Este documento é um sumário do que aprendi de fundamental. Algumas notas rápidas sobre o primeiro contacto com estes micro controladores. Contempla o aspecto fisico e o pinout, a …
Neato xv11

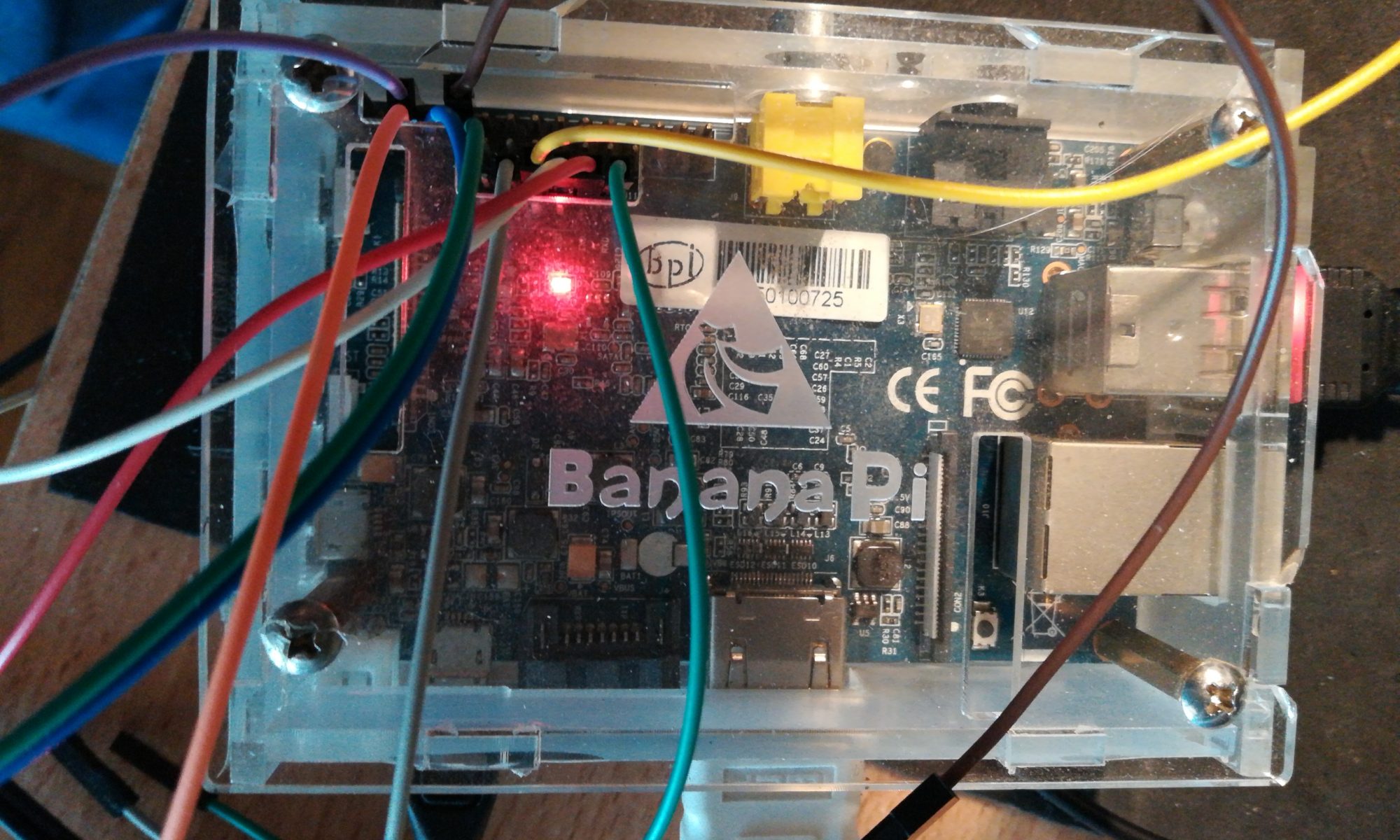
Hoje recebi um LIDAR neato xv11 que comprei no ebay em segunda mão. Desejoso de experimentar se funcionava e como não tinha os conectores apropriados para efectuar as ligações, antes de cortar os fios e colocar outros conectores, encaixei uns fios fininhos e testei. O ambiente de teste do LIDAR neato xv11 consistiu num Banana …
ROS Kinect Xbox 360
ROS Kinect Xbox 360 comandos rapidos freenect-glview roslaunch openni_launch openni.launch rosrun camera_calibration cameracalibrator.py –size 8×6 –square 0.108 image:=/camera/rgb/image camera:=/camera/rgb Recentemente comprei uma kinect Xbox 360 para usar na construção de um robot semelhante ao chefbot (quando tiver os componentes todos, já só falta o nuc). Quando a kinect chegou é que reparei que faltava …
Banana Pi i2c
Resultados da primeira exploração do bus i2c no Banana Pi M1, com o debian 9 (armbian), usando um giroscópio e acelerometro MPU6050 como dispositivo de teste. O MPU6050 tem como x68 endereço no bus i2c. Instalação e configuração do bus i2c no Banana pi M1 A instalação e configuração necessária para explorar o bus i2c é …