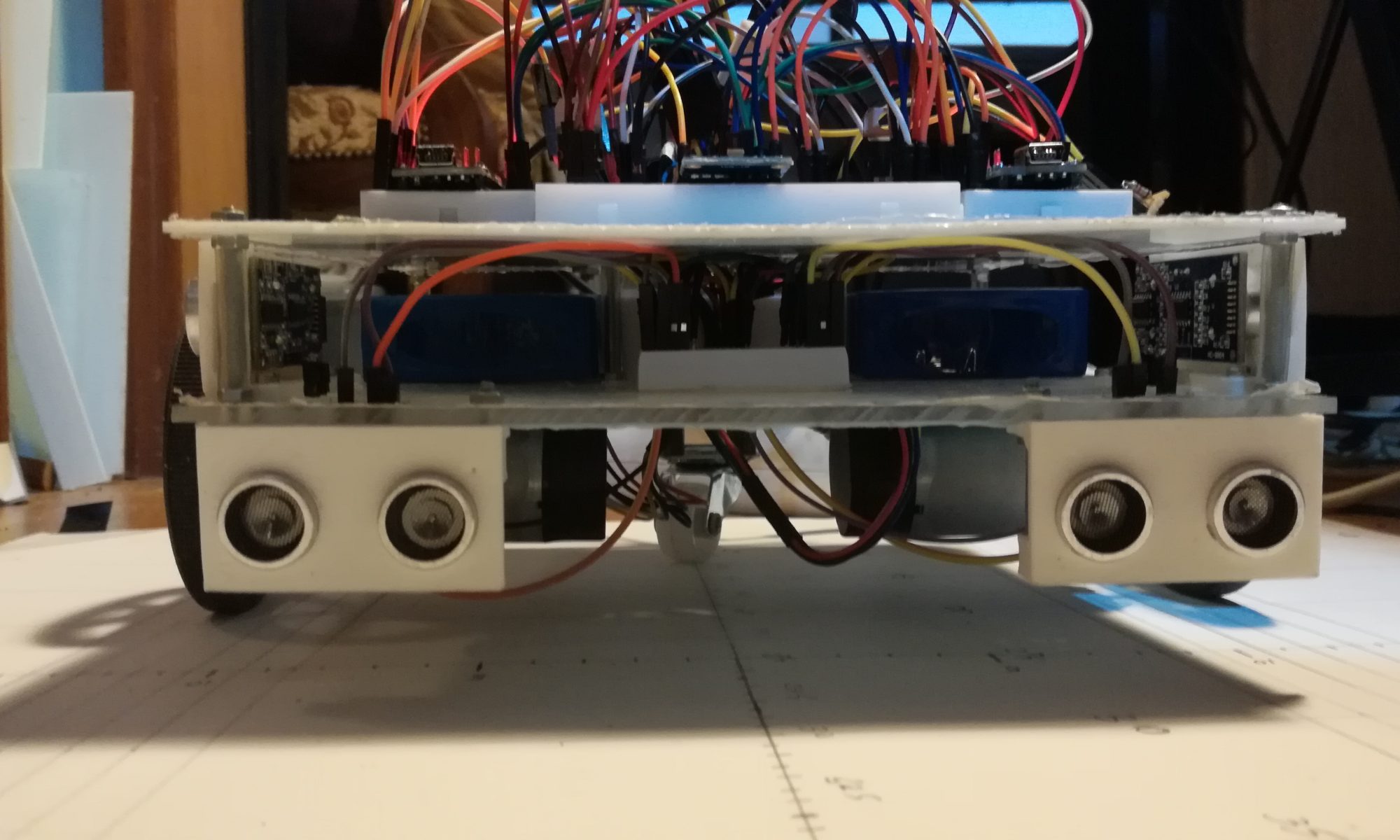
Robot 2WD DAMI-M2 v1.0.0 A versão inicial do robot M2 foi desenhada com base na mesma arquitectura distribuida usada no M3 e M4. No seu desenvolvimento propuz-me a rescrever o programa do microcontrolador dos motores de modo a aumentar a sua flexibilidade e também para diminuir a sua complexidade face ao programa usado no robot …
DAMI-M2 v1.0.0