O projecto do robot 2WD DAMI-M4 é outra tentativa de fazer um robot de duas rodas com propulsão diferencial com motores DC.
Este projecto, tal como os anteriores, surge depois das várias experiências negativas com os motores DC hoobie amarelos nos robots M1 e também na única versão do M2 (nota no rodapé).
Crente que o defeito é do material e não do artista (mas será artista), resolvi abrir os cordões à bolsa e comprar um par de motores supostamente decentes e oferecer uma prenda de natal antecipado a mim próprio.
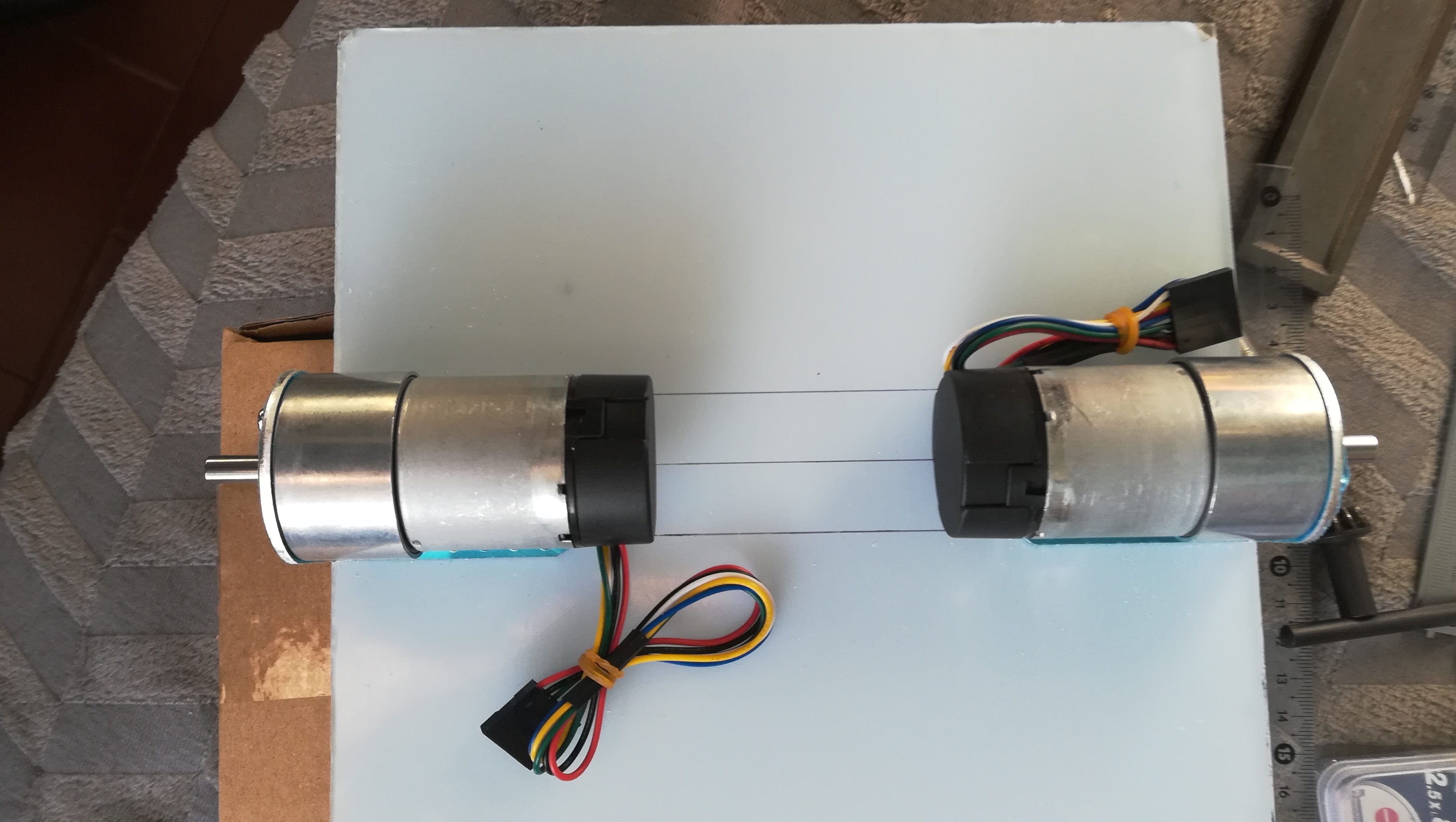
Acabei por escolher um par de motores identificados pela seguinte descrição: Pololu 30:1 Metal Gearmotor 37Dx68L mm with 64 CPR Encoder.
O modelo de robot 2WD DAMI-M4 é baseado na exploração desses motores.
Comecei a trabalhar no projecto à pouco mais de uma semana. Poucos dias depois de ter recebido os motores.
O primeiro objectivo é fazer a primeira versão funcional de algo semelhante ao que já fiz no robot DAMI-M3 com os motores de passo.
Esta fase envolveu:
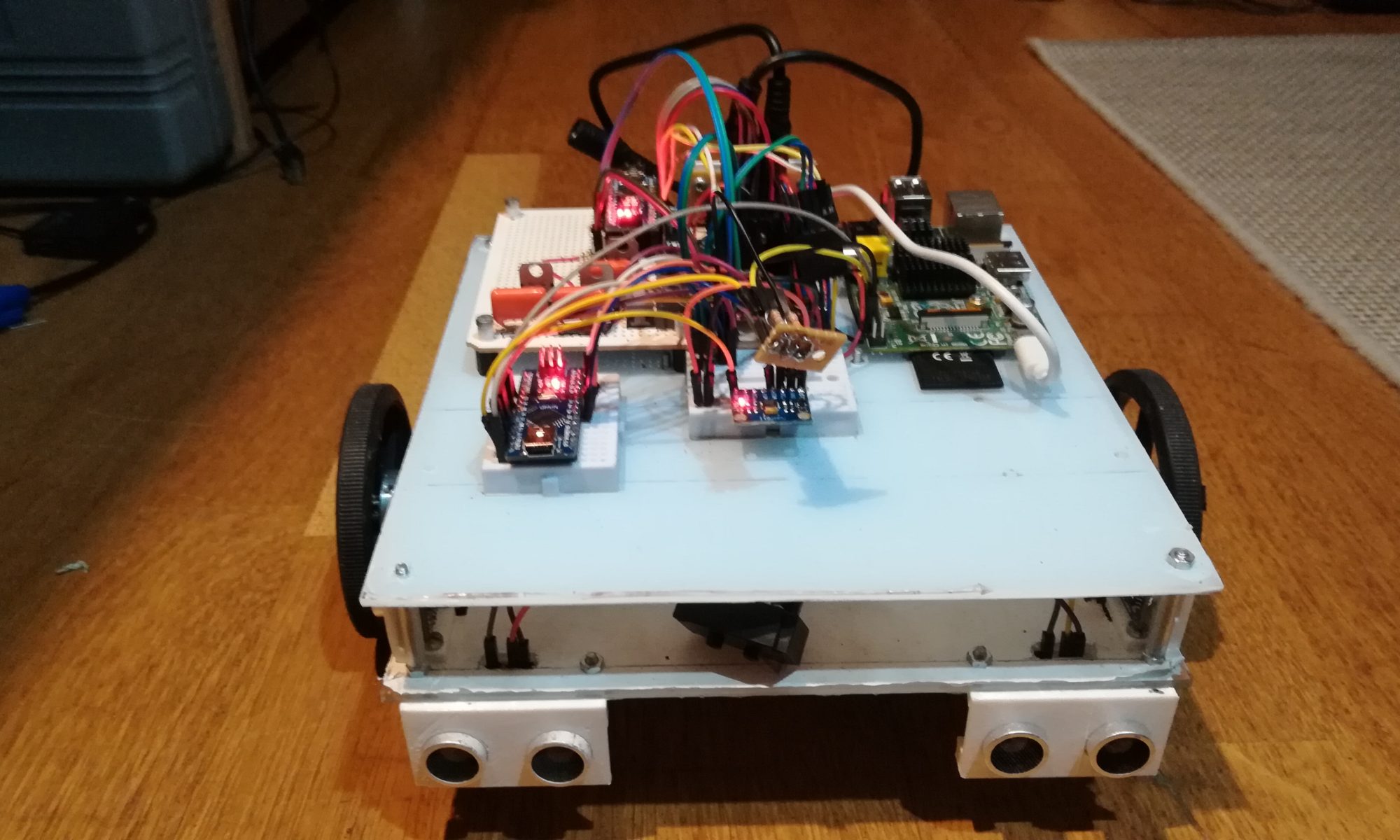
- Construir e montar os componentes fisicos, num prótotipo funcional;
- Desenvolver programas para os dois Arduinos e para o Raspberry Pi;
Abaixo segue foto da montagem e um pequeno video da primeira experiencia de funcionamento dos motores .
No video abaixo é apresentada a primeira viagem do robot M4 em linha reta com recurso ao controlo PID duplo. Ou seja um controlo PID para a velocidade e um controlo PID para a direcção.
Evolução do robot DAMI-M4
Notas
Motores hobbie amarelos usados nos robots M1 e M2 respectivamente:
- Motor hobbie amarelo com encoders opticos extra (20 pulsos)
- Motor hobbie amarelo com quadrature encoder (1920 pulsos)