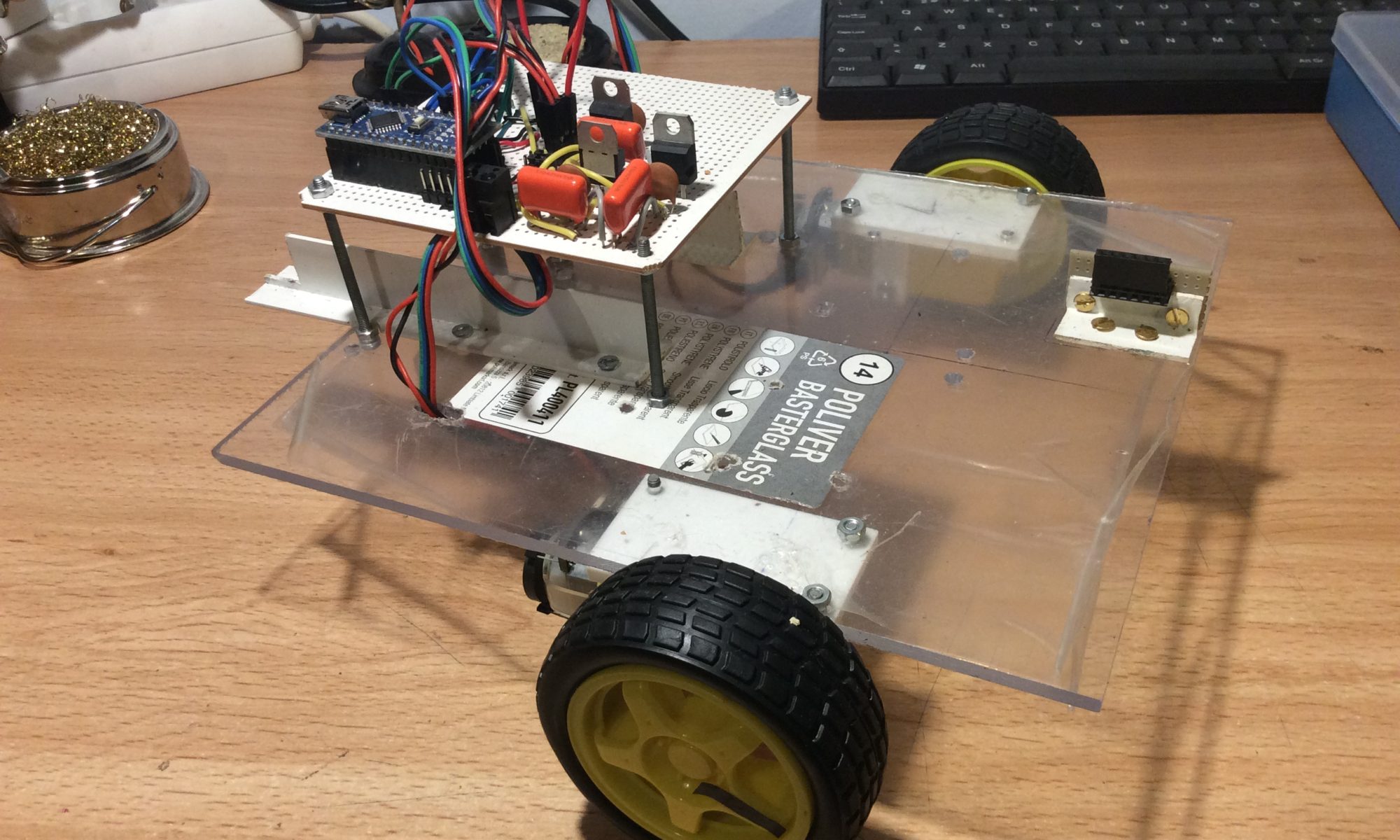
O projecto do DAMI-M2, surge na sequência do multiplos desaires do robot M1, e como ponte H usa um IC L293D em vez de um módulo L298N usado nas várias versões do M1.
O único objectivo deste modelo é simplesmente andar a direito de forma sistemática.
Comparado com todas as versões dos modelos do robot 2WD DAMI-M1 que construi, o M2 é o que tem o comportamento mais satisfatório naquele que considero o movimento fundamental dos robots: o movimento rectilinio.
O protótipo do M2 também serviu para um teste de bateria, em que trabalhou de forma continua durante quase três horas. Num movimento de vai vem, com rotação nos extremos.
Evolução do robot DAMI-M2
No final de Dezembro de 2018 o projecto do robot 2WD DAMI-4 está suspenso.
Desenvolvimento retomado em Janeiro de 2019.