
Introdução aos sonares activos
Os sonares activos são usados para detectar objectos solidos e tem aplicação na róbotica como sensores de distancia. Um exemplo de sonar usado em projectos de rrobótica é o sonar HC-SR04.
Principio de funcionamento dos sonares activos
Os sensores activos de ultrasons usados como sensores de distancia funcionam com base no calculo do tempo que ocorre entre a emissão de uma onda de ultra sons (pulso) e a detecção da onda reflectida de volta.
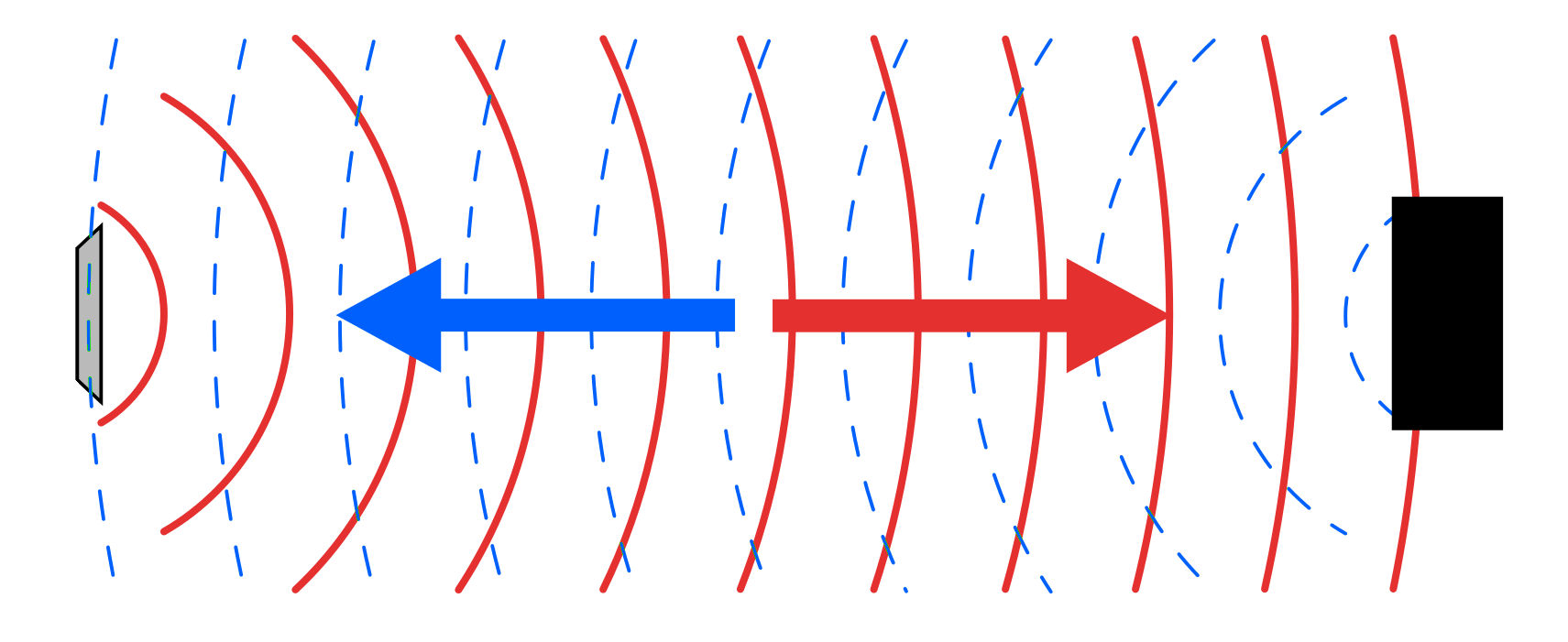
Na imagem, à direita está o emisor e receptor de ultrasons, à esquerda o obstaculo reflector, a vermelho a onda emitida e a azul a onda reflectida.
Os ultra sons são sons não audiveis pelos humanos, com frequências acima dos 20KHz e que nos sensores de distancia são gerados pelo efeito piezoelectrico existentes em certos materiais como alguns cristais.
O efeito piezoeléctrico é a capacidade de os materiais se deformarem com a aplicação de um campo electrico. Essa deformação produz oscilações mecanicas que se propagam pelo ar.
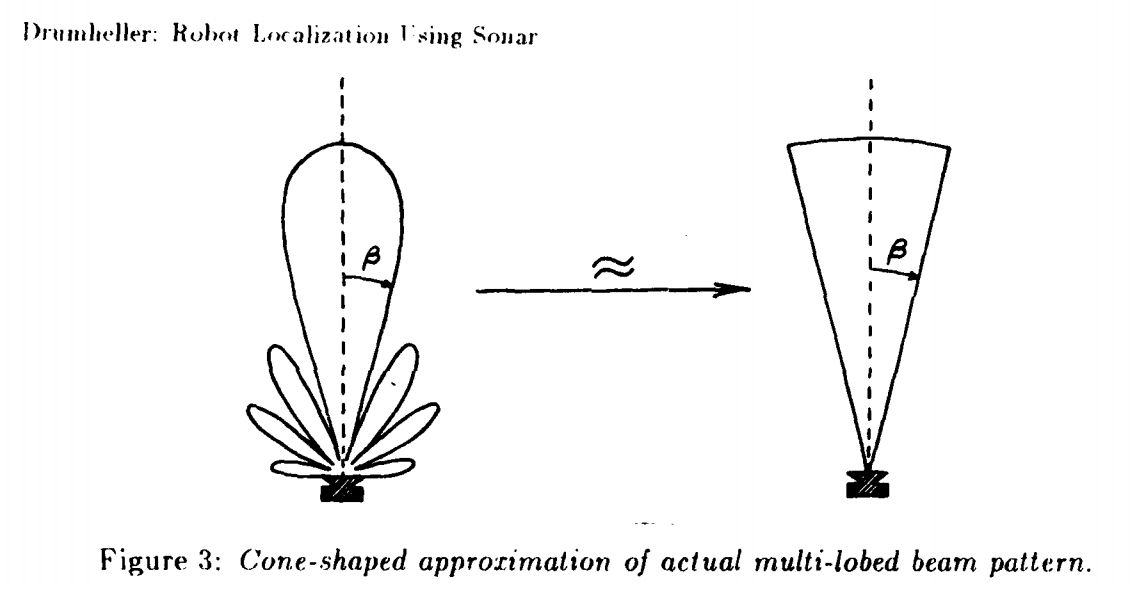
A onda ou pulso de ultra sons toma uma configuração espacial lobulada, com um lobulo frontal principal, conforme a imagem acima à esquerda, que se costuma modelar como um cone, com uma amplitude (beta) de cerca de 15 graus face à linha central do cone.
Natureza dos erros de leitura dos sonares de ultrasons
Existem diversos tipos de erros potencialmente presentes nas leituras dos sonares, alguns derivados da tecnologia usada e pelo menos um que é comum a todas as leituras que se faça do real.
Alem disso os diferentes materiais que compõem os objectos cuja a distancia se mede tem as suas proprias caracteristicas de reflexibilidade e absorção das ondas mecanicas que constituem o feixe de ultrasons.
Ruido de fundo nos sonares
Qualquer medida tem erro. Esse erro comum é vulgarmente conhecido por ruido.
Nos sonares o ruido nas leituras efectuadas é caracterizado pelas pequenas discrepancias nas leituras efectuadas que se aproximam do real. Por exemplo: fazem-se 5 leituras de um objecto a 50 cm de distância e obtem-se, 50, 49, 50, 48, e 51. Sem sabermos previamente a distancia por outros meios, como estimar a distancia mais correcta do objecto?
Nestas condições é necessário filtrar o ruido das leituras de modo a aumentar a sua precisão.
Existem várias tecnicas de filtragem aplicaveis a sonares com uma boa seleção exposta no seguinte link:
http://www.cs.sfu.ca/~ggbaker/data-science/content/filtering.html
Erro angular nos sonares
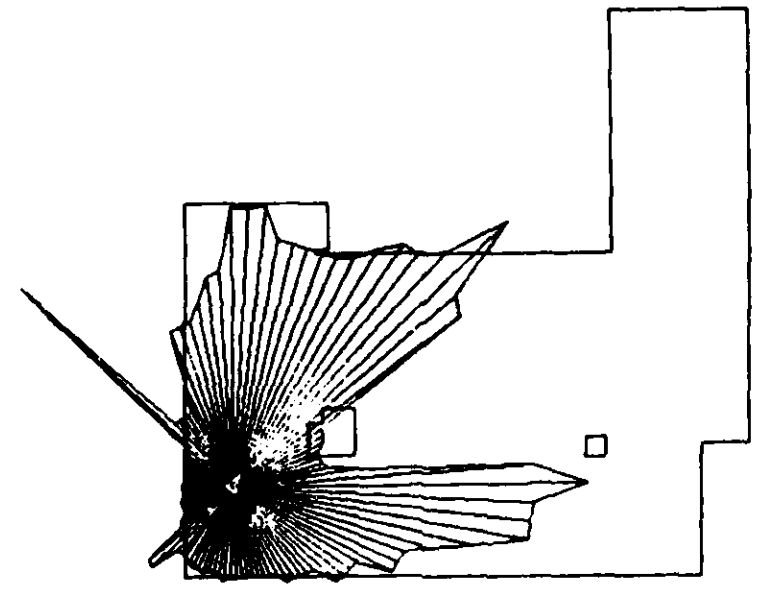
O erro angular é devido a largura do feixe, com 15 graus para cada lado do centro do feixe, a resolução é baixa resultando numa imagem imprecisa do real, como acontece nas leituras tomadas nos cantos.

Na imagem acima, as linhas em verde claro representam o pulso emitido, no entanto qualquer reflexão será emitida com base num ponto da parede que nao sera´coincidente com o centro do canto, como por exemplo o ponto inicial de uma das duas linhas verdes escuras, quando o que seria suposto medir seria a linha vermelha.
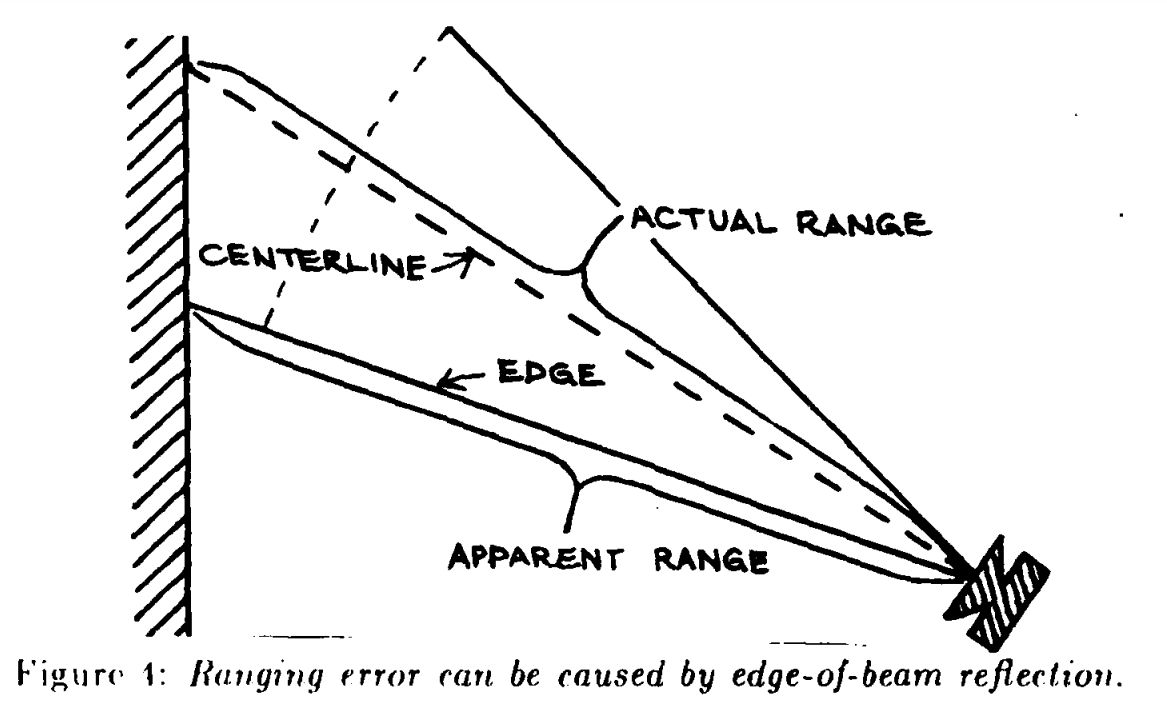
Erro radial nos sonares
O erro radial acontece quando o feixe ultrasom do sonar incide de forma obliqua numa superficie plana. Pois o que é captado será no limite do feixe e não na sua bisectriz (o centro do feixe).
Falsas reflexões nos sonares
As falsas reflexões acontecem porque, o pulso ultrasom do sonar tem cerca de 55kHz e o comprimento de onda de 6.35mm, por isso, a não ser que a superficie alvo tenha irregularidades na mesma ordem de grandeza, o sinal ultrasom do sonar nao será espalhado e perdido para outro angulo em vez de reflectir um eco forte de volta para o sonar.
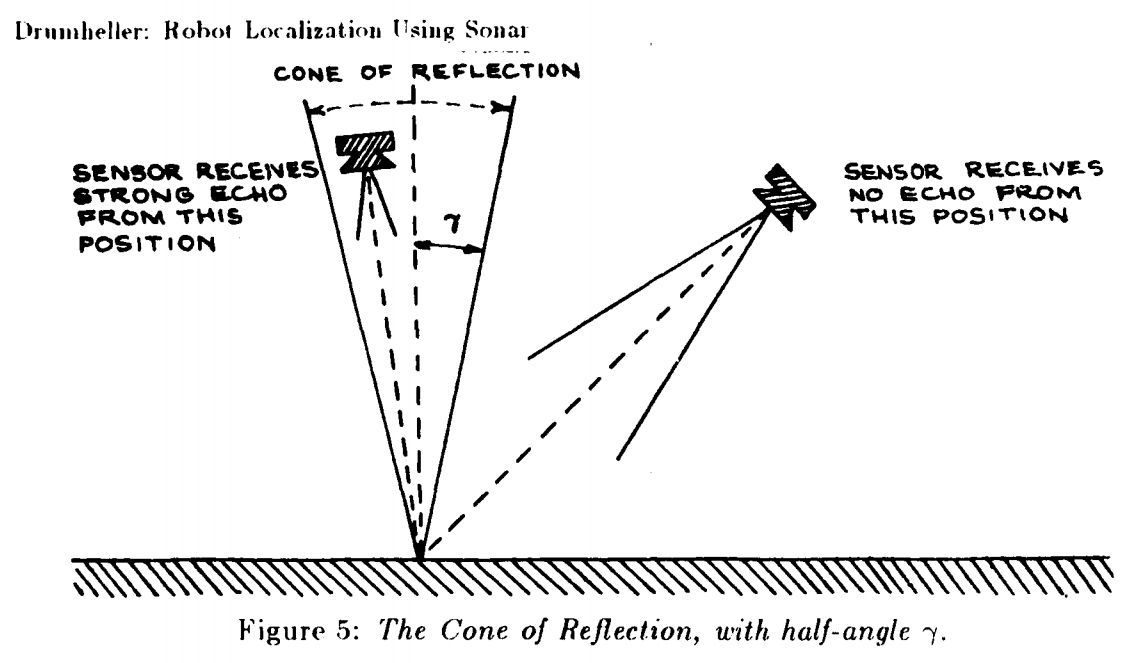
Quando o angulo de incidencia (alpha) é maior que o angulo critico (beta) que define o cone de reflexão, as leituras são demasiado longas e incompativeis com a realidade (horns).
Cada material tem o seu proprio angulo critico, e por conseguinte um cone de reflexão especifico.
Ecos fantasma nos sonares
Os ecos fantasmas são constituidos por pulsos que foram emitidos previamente, mas que são detectados como resposta a um pulso posterior.
Na imagem abaixo o verde claro representa o pulso emitido pelo sonar, e o verde escuro o feixe duplamente reflectido.

Esta situação acontece porque os pulsos podem ser reflectidos por mais que um objecto antes de chegar de volta ao sensor, e ao demorarem demasiado tempo, surgem anormalmente detectados na leitura subsequente.
Interferencias entre sonares
As interferencias entre sonares acontecem quando o pulso de um sonar é detectado como reflexo do pulso de outro sonar.
Links
Michael Drumheller, Mobile Robot Localization Using Sonar (1985)
https://apps.dtic.mil/dtic/tr/fulltext/u2/a158819.pdf