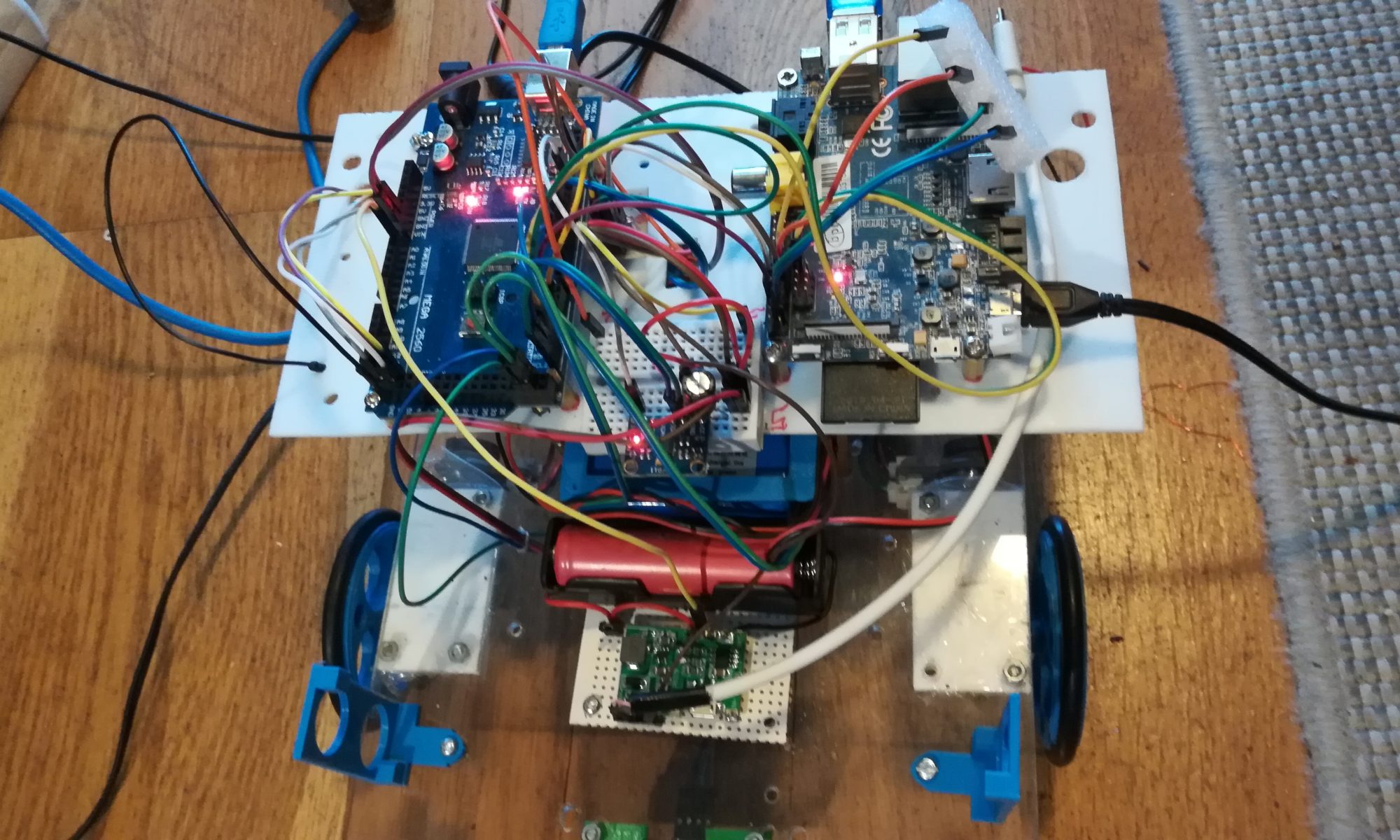
rospibot1 hardware version
Revised DAMI-M4, with less sonars, no laser rangefinder, and a mpu6050.
rospibot1 TODO
Understand the motor bridge-h and encoder configuration using twist messages. Implemented in v 0.1 and not fully functional yet. (semi done in v0.13)
- Understand the tf messages and how to use it to do odometry. Implemented message in v0.6 but it allways brodcast same values.
rospibot1 version history
rospibot1 0.13
- update: pid preprocessing code to allow run backward and rotate using twist messages
- update: new encoders code to allow 1920 pulses per revolution instead of 960 pulses with the old code
rospibot1 0.12
- done: debug messages on alternate serial (TTYS1 on bpi)
- update: battery sense (bugfix)
rospibot1 0.11
- update: pid control (using pid_v1), instead of direct pwm (need to rewrite because only run forward)
rospibot1 0.10
- update: rewrite to use multiple files
rospibot1 0.9
- update: ultrasound (using newPing)
rospibot1 0.8
- update: ultrasound and battery sense
rospibot1 0.7
- done: battery sense
rospibot1 0.6
- done: tf broadcaster (incomplete, because i dont understant how to calculate the parameters
rospibot1 0.5
- done: internal led pulse
rospibot1 0.4
- try: internal led pulse, looptime and diag publish (not working)
rospibot1 0.3
- done: mpu6050
rospibot1 0.2
- done: ultrasound
rospibot1 0.1
- done: motor bridge-h
- done: encoders