DAMI-M1 v1.0.0
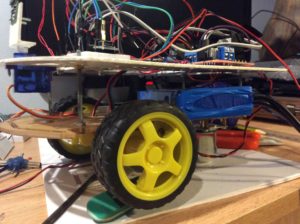
Este modelo de teste do DAMI-M1 foi o reaproveitamento do modelo de teste anterior com melhores resultados em que usei os primeiros motores com os encoders de 20 pulsos montados no chassi comprado originalmente, e dois modulos controladores (bridge H) L298N, um por cada motor.
Hardware
- Arduino nano 168P
- L298N x2
- Medidor de distancia lazer VL530X
- Servo SG-90
- Bateria Lithium 12V / 6800 mA
- Circuito de alimentação (12V > 8v) (7808)
Isto para além das usuais placas de montagem, jumpers, parafusos, porcas, suportes feitos à mão ou em impressora 3D.
A impressora 3D permitiu-me desenhar e imprimir os suportes necessários para os motores com encoders de 120 pulsos.

Software
test_pid_2encoders
Teste 1
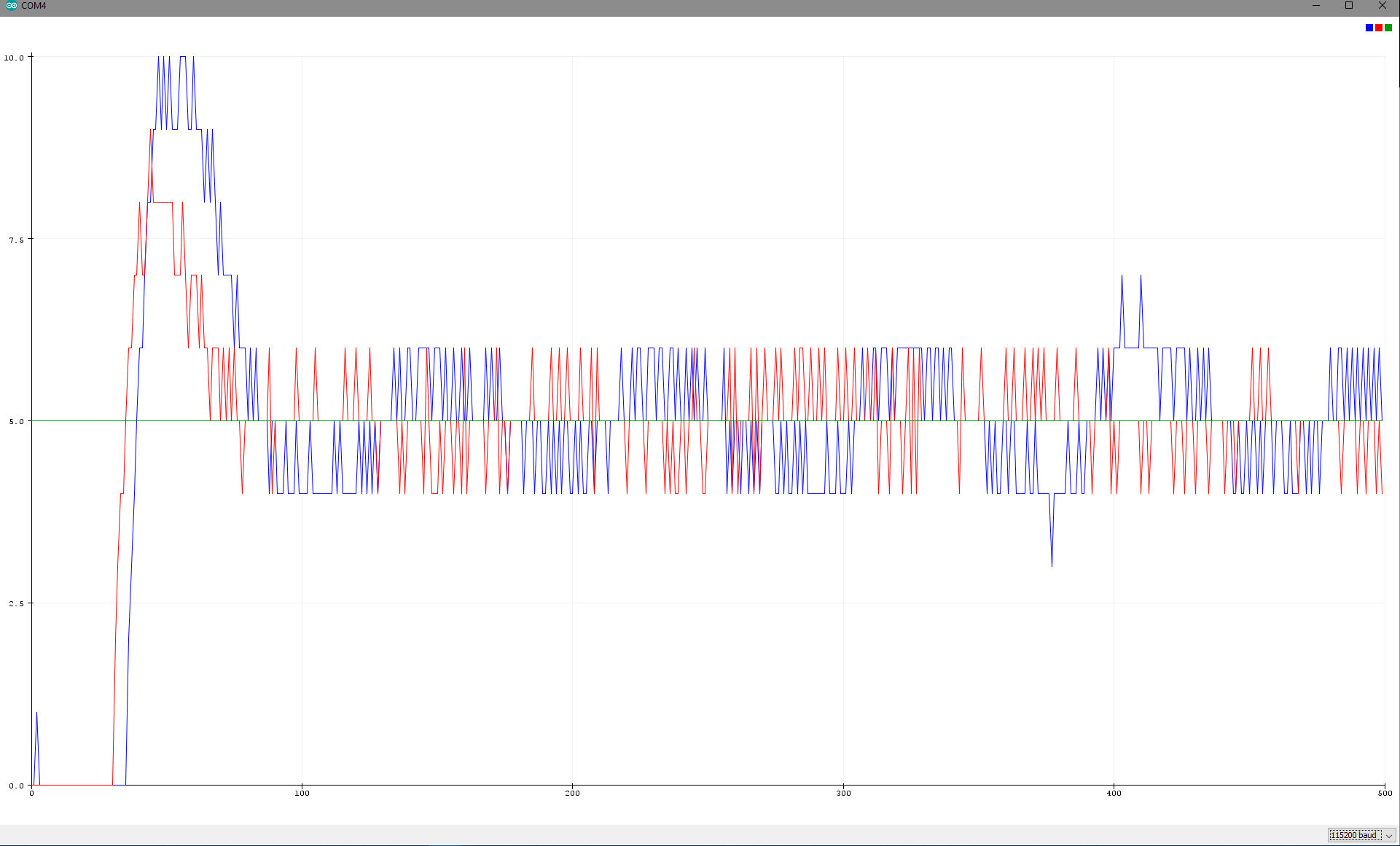
Teste PID simples com base na bliblioteca <PID_v1> com os seguintes parametros:
#define pidSetPoint 5
#define pidSampleTime 25
#define pidLeftMinOutput 40
#define pidLeftMaxOutput 200
#define pidRightMinOutput 40
#define pidRightMaxOutput 200
#Kp=0.6, Ki=5, Kd=0;
Plot do resultado do PID