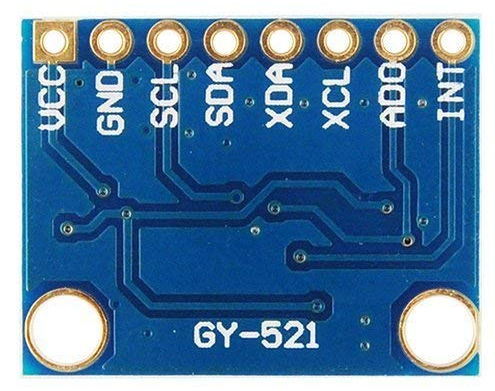
A GY-520 é uma placa de exploração do MPU6050 com o aspecto da imagem abaixo.

Esta placa inclui o MPU6050 e electrónica auxiliar, nomeadamente um regulador de tensão para 3.3V.
O esquema desta placa é o exibido abaixo.
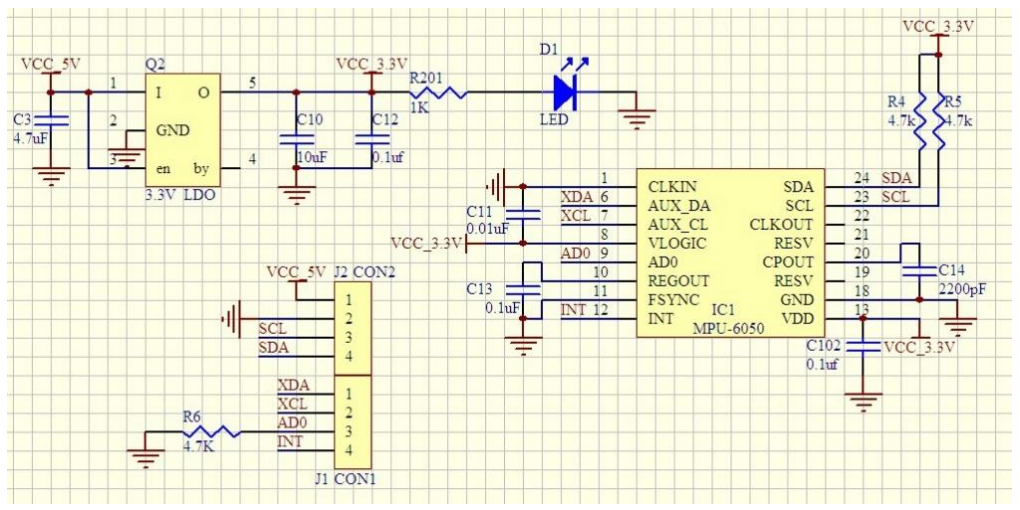
Segundo este esquema, a placa deve ser alimentada com 5v, e é também notório que o SDA e SCL têm resistências pullup de 4.7k para os 3.3V, assim como um condensador de decoupling de 0.1uF, entre oVDD e GND.
O esquema, assim como outras informações estão disponíveis no ficheiro: MPU_6050_GY-521_Datasheet
Notas:
No arduino, o MPU6050 deixa de funcionar, e não deixa avançar o programa, quando o uso em conjunto com 2 steppers 28BJY-48 com os drivers ULN2003.
No Pi acontece a mesma coisa em momentos aleatórios quando usado em conjunto com motores DC.
todo: explorar o smbus2
https://pypi.org/project/smbus2/
Definir a velocidade do i2c no Raspberry Pi
Os valores podem ser 1200000, 400000, 100000
modprobe -r i2c_bcm2708 modprobe i2c_bcm2708 baudrate=1200000
Para aplicar a configuração de forma persistente criar um ficheiro em /etc/modprobe.d/ com:
options i2c_bcm2708 baudrate=400000
..
Informação principal
https://playground.arduino.cc/Main/MPU-6050
Biblioteca usada
http://www.i2cdevlib.com/devices/mpu6050
https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050
Existem mais bibliotecas a explorar
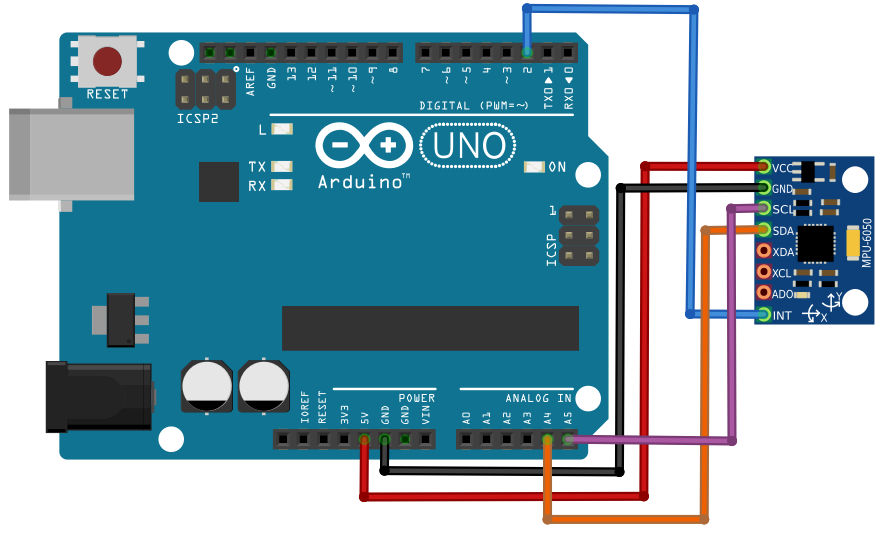
Ligações ao arduino
Programação
Exemplos incluidos na biblioteca
Algumas informações sobre problemas do MPU6050 no pi:
https://www.raspberrypi.org/forums/viewtopic.php?t=77778
Ligações a explorar
Informação sobre uso dos dados 3D no processing
https://maker.pro/arduino/tutorial/how-to-interface-arduino-and-the-mpu-6050-sensor
A good guide for gyro and accelerometer and Kalman filtering in the forum: http://arduino.cc/forum/index.php/topic,58048.0.html
Getting pitch and roll from gyros and accelerometers for Stabilising Stuff:
http://www.den-uijl.nl/gyro.html
Compass Hard Iron auto Solver, 360 Compass Compensation, accelerometer, yaw, pitch, roll:
https://www.electronicwings.com/raspberry-pi/mpu6050-accelerometergyroscope-interfacing-with-raspberry-pi