Software
prg-master
prg-slave
dami-base
Geral
Reformular o sistema de alimentação do robot
Esta reformulação pode implicar a alteração do local dos Arduinos secundários, e reduzir o tamanho da placa de testes maior.
- Colocar forma de medir a carga das baterias, incluindo o power pack do Raspberry Pi.
- Arranjar forma de trocar a alimentação do Raspberry Pi entre o power pack sem ter que estar a trocar o cabo na ficha de alimentação do pi.
- Colocar interruptores entre as baterias (inc. power pack) e os 3 destinos diferentes.
- Fazer os circuitos dos reguladores de tensão em placa perfurada.
Fazer o reset dos Arduinos por hardware.
Estudar o posicionamento dos sensores de distancia
Esquema à escala de 5/1, com os actuais sonares frontais, e um futuro sensor de distancia laser.
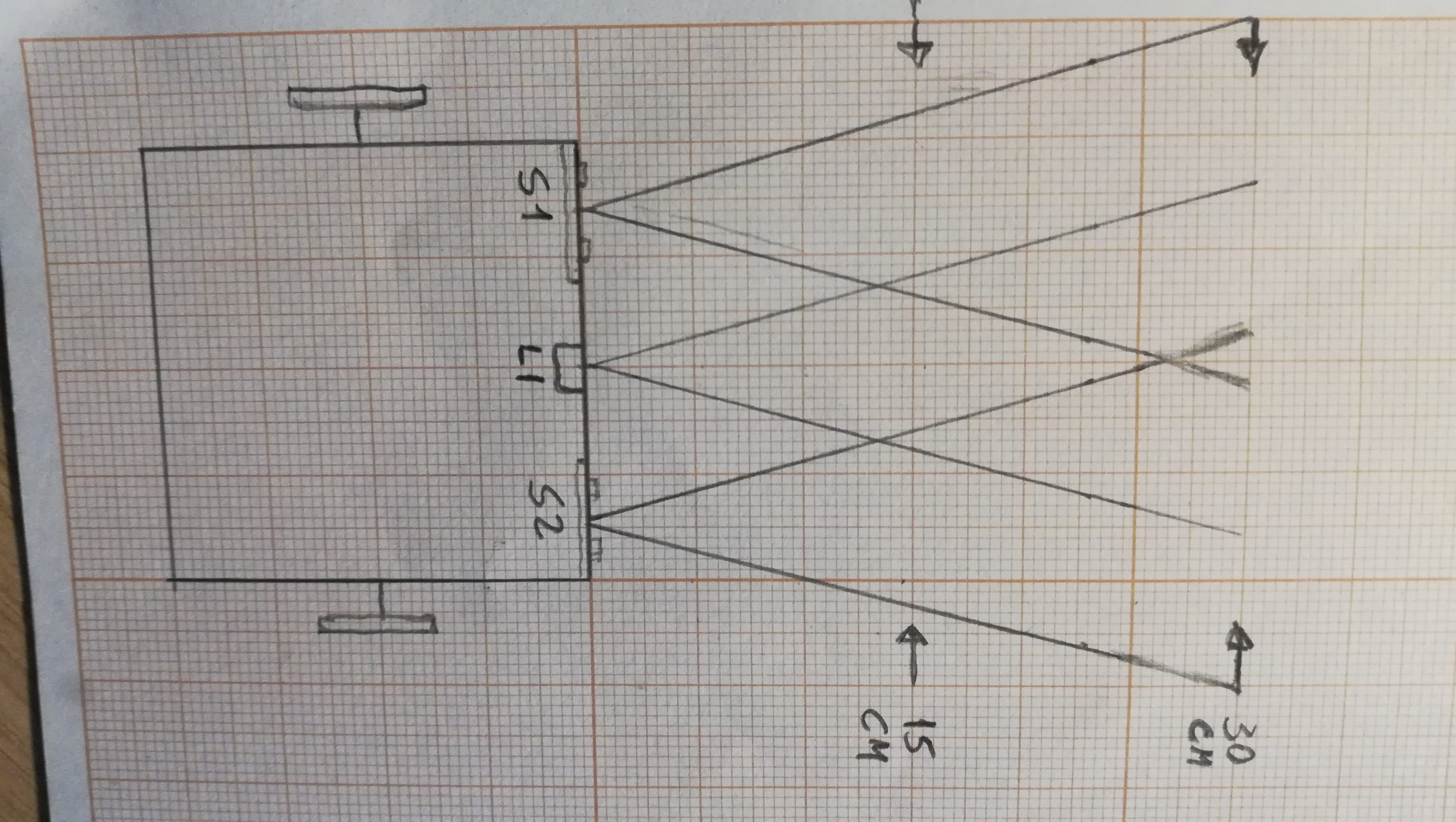
Tambem estou a pensar adicionar dois sonares laterais a retaguarda, para poder alinhar a parede facilmente
- Implementar odometria
Possibilidade de modular os movimentos
Neste mometo o arduino 1, o master, envia comandos com os movimentos desejados para o Arduino 2, o slave, que os recebe, executa e informa de volta o progresso e quando terminam, até lá o master não pode enviar mais nenhum comando de movimento que não seja o de paragem .
Neste sistema, baseado na implementação desenvolvida para o robot DAMI-M3, com motores de passo e a biblioteca accelsteper, cada movimento é prédefinido no comando recebido e não pode ser modulado (alterado) durante a sua execução.
Com os motores dc gostava de fazer algo mais flexível. Para além de querer curvar, gostava de alterar a velocidade, e transformar um movimento rectilíneo numa curva e vice versa.
com a presente implementação do Controlo PID de velocidade e direção tal não é possível, pois não dá para implementar uma velocidade por motor.
terei que voltar ao antigo método de controlo do pid de velocidade nos dois motores, e tratar do problema da direção de outra forma, tipo o ajuste nos inputs do pid de velocidade, ou directamente no pwm.