DAMI-M3 v1.1.0.a1 – Actualização 1
Actualização da programação
Conceitos gerais usados
O envio de dados radio para a base foi repensado de forma a trabalhar com paginas de 32 bytes, cada uma com um tipo de dados especifico.
- Página 0 – dados gerais do loop
- Página 1 – dados do servo scan frontal
Detalhes
- Robot
- Implementação do comando Pause
- Implementação de envio dos pontos do varrimento (servo scan) para a base, na página 1;
- Redefinição dos dados enviados por radio, na página 0;
- Base
- Implementação de envio de comandos simples (pause, go); o processamento destes comandos ainda necessita de ser implementado no robot, já está lá um placeholder;
- Redefinição dos dados recebidos por radio, na página 0 ;
- Implementação da recepção dos pontos do varrimento (servo scan) na página 1;
- Envio de valores para o processing3 em cm (xyz/10);
- Processing
- Implementação da apresentação no processing3 dos pontos dos varrimentos
Software
- Robot
- dami_m3_master_sensor_mod2_v12
- dami_m3_slave_motion_mod2v5
- Base
- dami_nrf24l01_rxbase_v2
- Processing
- dami_map_mod1_v3
Teste
O ambiente de testes foi o mesmo do teste inicial desta versão de hardware
Resultados
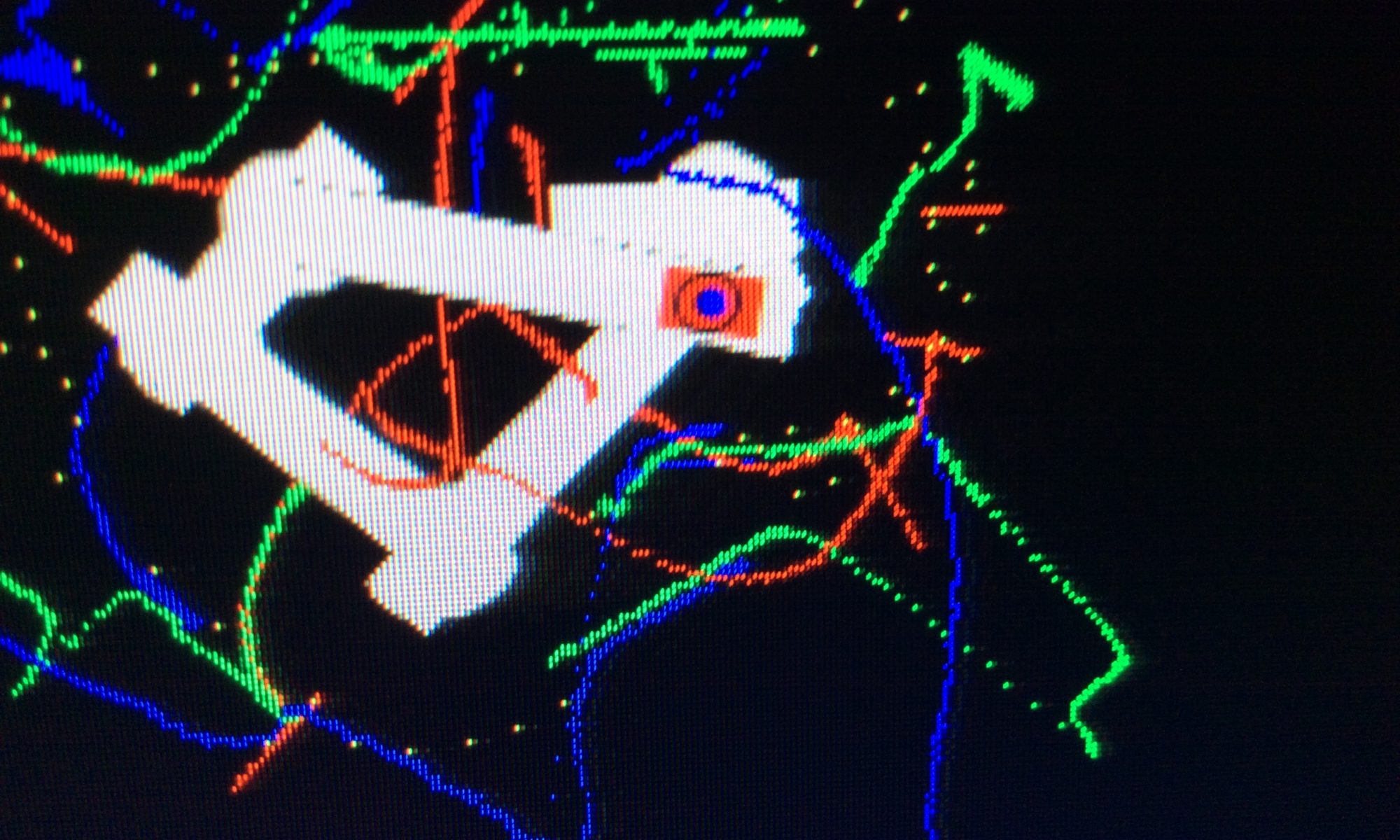
Foram efectuados três testes durante os quais foi identificado e corrigido o erro de apresentação da orientação dos pontos do varrimento do servo frontal.
Tentei a apresentação a várias escalas, e também tentei no final uma versão em que a linha do ponto ao robot não é exibida.
Como não consegui ver com clareza os limites da área os testes não foram satisfatórios.
Tenho que analisar os resultados e melhorar a apresentação dos contornos da area. Como a memoria no arduino é reduzida talvez deva tentar uma solução de mapa por tabela dentro do procesing3.
Teste 1
Teste 2
Teste 3
Notas
Problema de estabilidade do VL53L1X
O condensador 1000 uF não resolveu completamente o problema, mas minorou bastante. Até agora funcionou de forma estavel a maior parte das vezes.
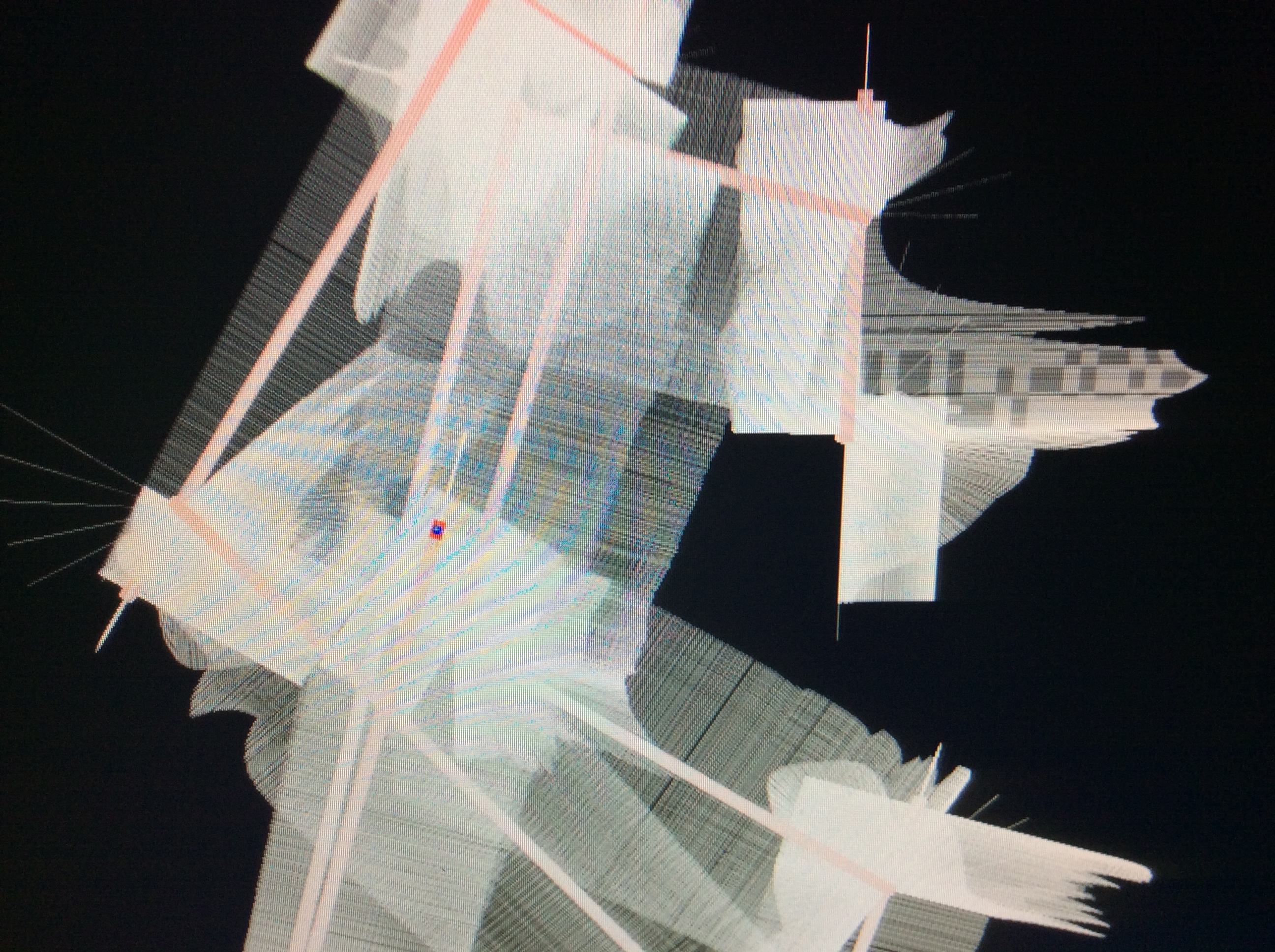
Mapa do ambiente
Tenho que analizar melhor os resultados do grafico e proceder a melhorias.
Os aspectos que quero clarificar e corrigir caso necessário, são pelo menos os seguintes:
- Escala de apresentação e proporção do carrinho face a escala das leituras
- Orientação do robot e dos pontos
- Encontrar forma de melhor definir os contornos do espaço ocupado
Os aspectos que quero investigar são os seguintes:
- Possibilidade de efectuar o mapa de ocupação no processing3
- Possibilidade de apresentar o mapSummary tal como está no arduino como layer no processing3
- Possibilidade do processing3 mandar comandos para o robot