Este estudo sobre o sensor VL53L0X sem marca faz parte do projecto de avaliação do comportamento dos sensores de medição de distancia. Preparação O hardware minimo necessário, para além dos fios, placa de teste e alimentação: Um arduino Um sensor VL53L0X Um suporte para o sensor O software utilizado no teste foi o exemplo que demonstra …
Calculo de um angulo entre duas retas
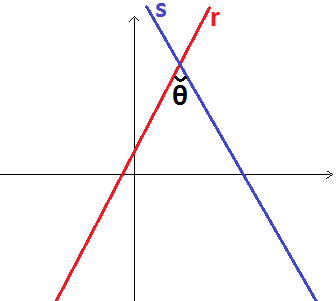
Formula para calcular o angulo entre duas retas que se intersectam num ponto. Duas retas r e s na forma ax+b, tais que: r: y1 = a1x1 + b1 s: y2 = a2x2 + b2 O coeficiente angular m o valor de a, ou seja a inclinação da reta, por isso mr=a1 e ms=a2 Com estes valores pode-se calcular …
Avaliação do sensor de distância VL53L0X-pololu
Este estudo sobre o sensor VL53L0X-pololu faz parte do projecto de avaliação do comportamento dos sensores de medição de distancia. Preparação O hardware minimo necessário, para além dos fios, placa de teste e alimentação: Um arduino Um sensor VL53L0X Um suporte para o sensor O software usado no teste foi o exemplo da biblioteca aconselhada …
Continuar a ler “Avaliação do sensor de distância VL53L0X-pololu”
Controlo de motores DC em robots de propulsão diferencial
Avaliação de abordagens ao controlo de motores DC em robots de propulsão diferencial 2WD. Todas as abordagens estudadas tem como objetivo o controlo coordenado e sincronizado dos motores de propulsão de forma a executar com precisão movimentos simples e fundamentais a locomoção do robot. Movimentos em robots Tomando em consideração a cinemática aplicada a robots …
Continuar a ler “Controlo de motores DC em robots de propulsão diferencial”
Controlo PID em arduino aplicado a motores DC
Controlo PID em arduino aplicado a motores DC usados no ambito da robótica. Biblioteca https://playground.arduino.cc/Code/PIDLibrary Os principais objectivos do controlo PID dos motores DC serão: Acelerar e desacelerar os motores de forma controlada Manter uma velocidade estável nos motores Coordenar e sincronizar motores Todo esses objectivos são alcançados tendo em consideração o desempenho real …
Continuar a ler “Controlo PID em arduino aplicado a motores DC”
PWM – Pulse With Modulation
Pulse Width Modulation, cujo acrónimo é PWM, refere-se ao conceito baseado na rápida variação (a uma frequência pré definida – frequência de modulação) de um sinal digital, em periodos de tempo em que o sinal está alto e ou baixo, o ciclo de trabalho ou periodo. A taxa do ciclo de trabalho (tempo em que …