Ros ultrasound sonar HC-SR04 sensor_msgs/range exemplos de utilização os sonares simples não podem ser usados por nenhum dos pacotes de navegação do ros.
Ros Stepper
ros stepper sensor_msgs::JointState Exemplos de utilização https://github.com/djiglesias/ros-utilities/tree/master/ros_camera_sweep
Ros battery
ros battery ros sensor_msgs/battery Exemplos de utilização https://github.com/djiglesias/ros-utilities/tree/master/ros_battery_monitor https://www.instructables.com/id/1S-6S-Battery-Voltage-Monitor-ROS/
Ros odometry
ros odometry ros sensor_msgs/odometry exemplos de utilização http://wiki.ros.org/navigation/Tutorials/RobotSetup/Odom https://gist.github.com/atotto/f2754f75bedb6ea56e3e0264ec405dcf https://github.com/qboticslabs/Chefbot_ROS_pkg/blob/master/chefbot/chefbot_bringup/scripts/diff_tf.py
Banana pi login ttyS0
Alterar o funcionamento da porta serie ttyS0 no Banana pi m1 de modo a não apresentar o login na porta serie ttyS0. Vi descritas duas soluções no forum do Armbian. A primeira envolve editar o ficheiro boot.cmd e remover a referencia à consola ttys0 na linha dos argumentos do boot. sudo nano /boot/boot.cmd Na linha …
Rosserial – ROS e os microcontoladores
O ROS integra-se com vários microcontroladores recorrendo às respectivas portas série. Para facilitar a implementação das comunicações entre o microcontrolador e o ros existe o pacote rosserial.
Robot rospibot1 version history
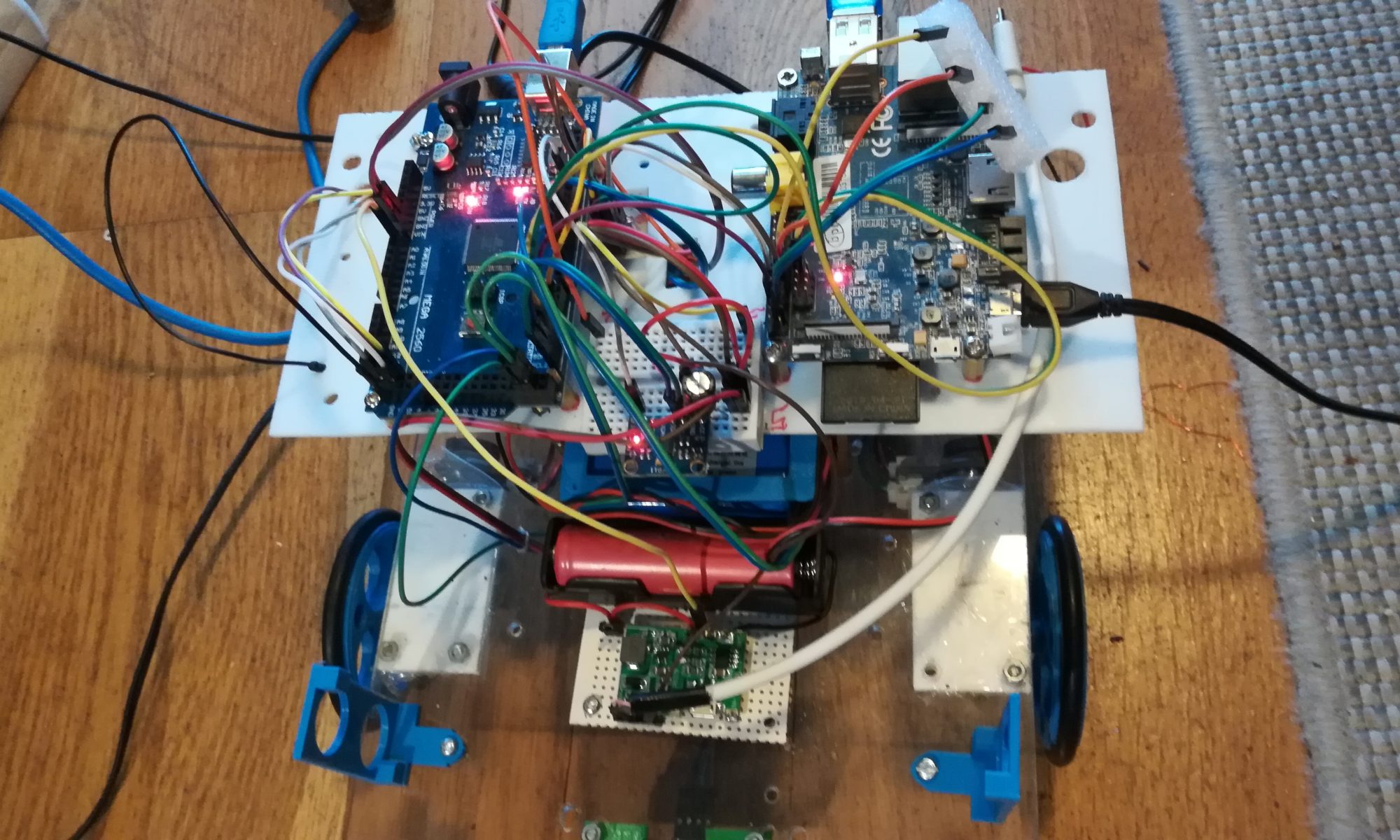
rospibot1 hardware version Revised DAMI-M4, with less sonars, no laser rangefinder, and a mpu6050. rospibot1 TODO Understand the motor bridge-h and encoder configuration using twist messages. Implemented in v 0.1 and not fully functional yet. (semi done in v0.13) Understand the tf messages and how to use it to do odometry. Implemented message in …
Um ano depois do primeiro robot
Um ano depois do primeiro robot continuo longe dos meus objectivos: um robot capaz de auto localização e mapeamento simultaneo do ambiente. Pelo caminho ficaram várias experiências de construção de robots, em pelo menos 2 fases. Na primeira adquiri o conhecimento básico para sistemas simples, na segunda fase elaborei sistemas distribuidos. Todos os robots que …
Ros robot chefbot
Implementação do chefbot de acordo com o livro: Learning Robotics using Python, Resumido no seguinte artigo: https://hackaday.io/project/8588-diy-autonomous-mobile-robot Num robot com um Arduino mega e um Portatil x86_64 Programas usados disponiveis em: https://github.com/qboticslabs/Chefbot_ROS_pkg Neste projecto procurei efectuar exactamente as instruções do livro, e por isso foram usadas as versões do ubuntu e ros indicadas pelo livro, …
ros melodic chefbot encoders test
ros melodic chefbot encoders test chefbot_encoders_test1 #include <PinChangeInterrupt.h> #include <ros.h> #include <std_msgs/Int32.h> ros::NodeHandle nh; std_msgs::Int32 int_encoder_msg1; ros::Publisher encoder_data1(“encl”, &int_encoder_msg1); std_msgs::Int32 int_encoder_msg2; ros::Publisher encoder_data2(“encr”, &int_encoder_msg2); /////////////////////////////////////////////////////////////// //Encoder pins definition // Left encoder #define Left_Encoder_PinA 2 #define Left_Encoder_PinB 22 volatile long Left_Encoder_Ticks = 0; volatile bool LeftEncoderBSet; //Right Encoder #define Right_Encoder_PinA 3 #define Right_Encoder_PinB 23 volatile long …