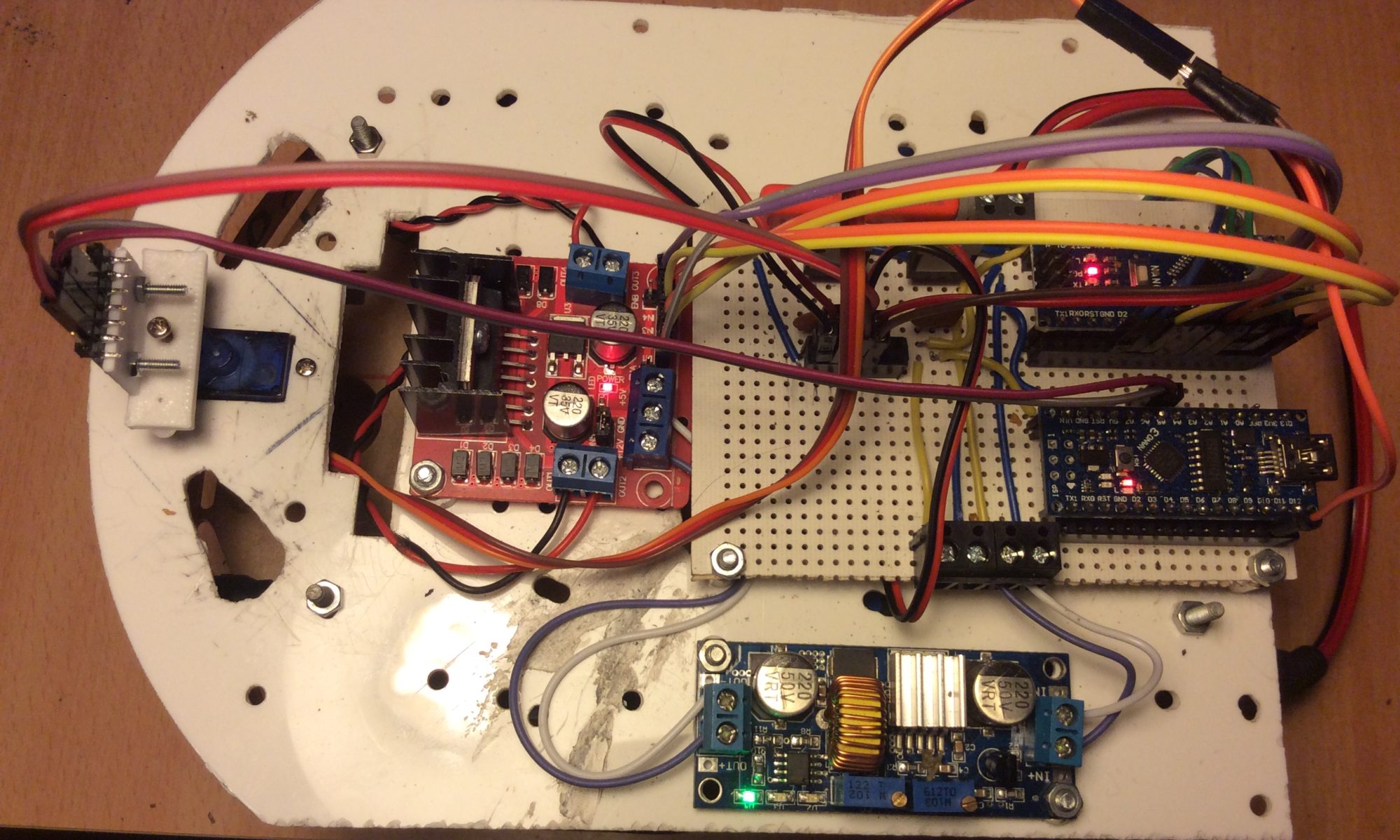
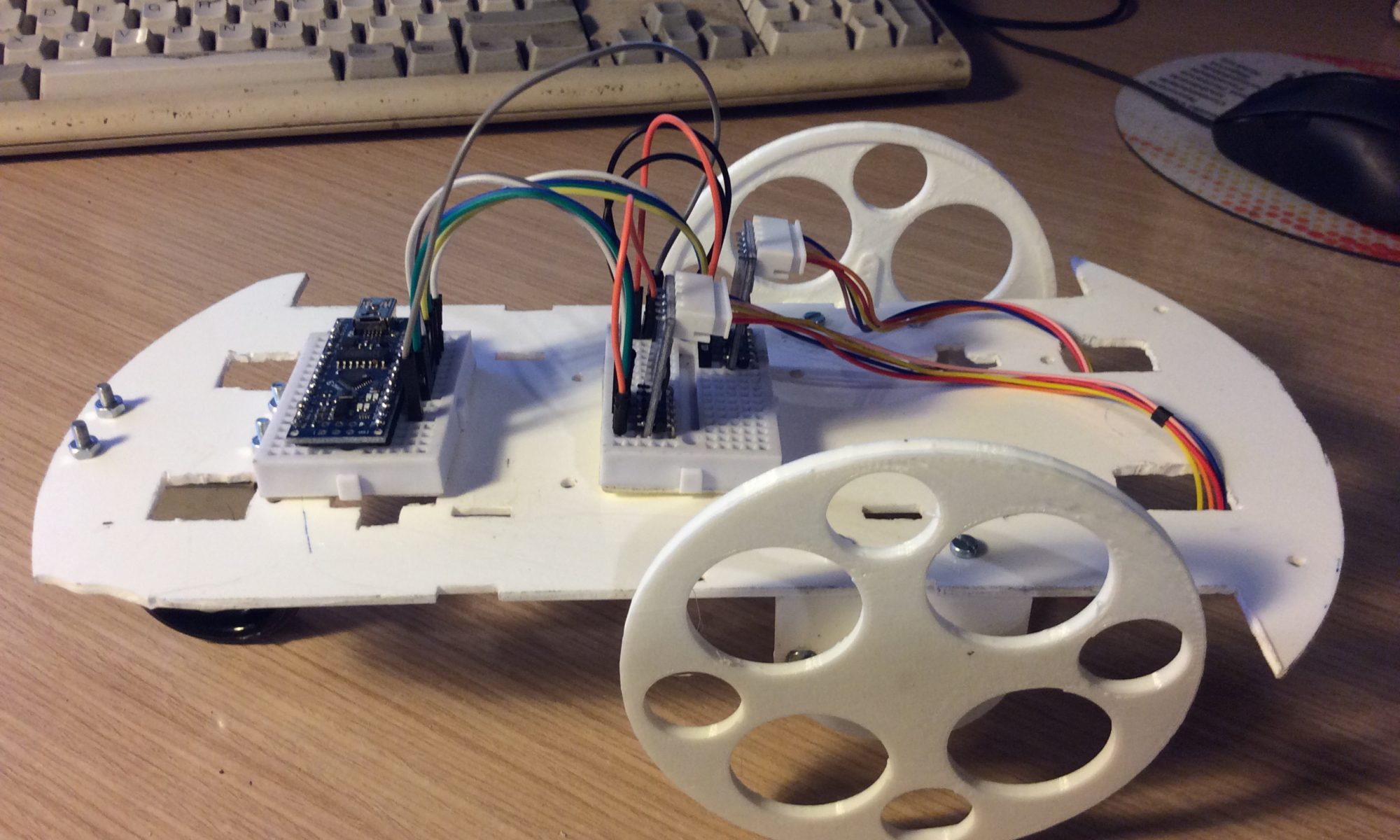
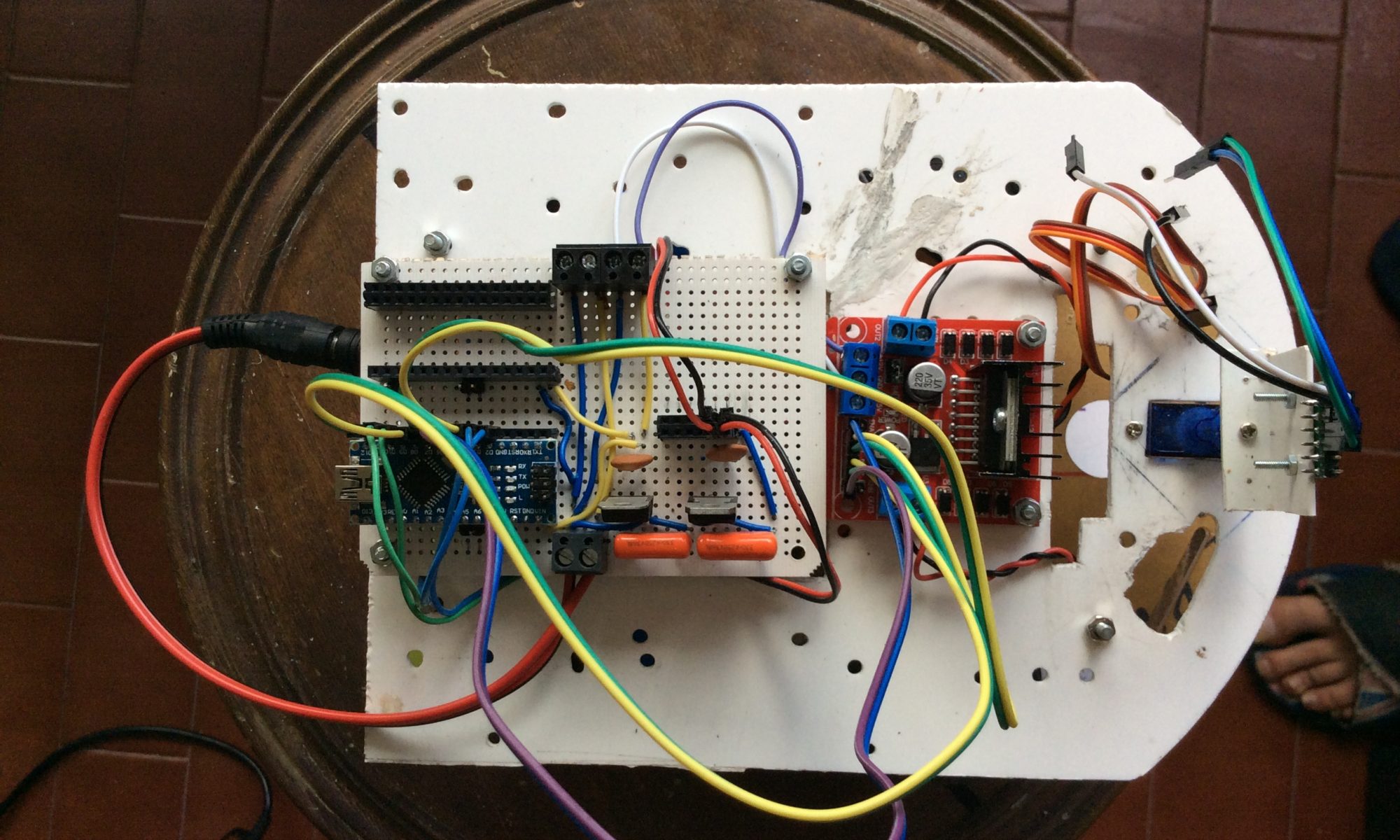
O DAMI-M1 teve algumas alterações no hardware e começou a ter o esqueleto do software que vai controlar os movimentos do robot. Hardware As alterações ao hardware, em parte já estavam presentes. O servo e o sensor de distancia já lá estavam montados à algum tempo. Mas o suporte do sensor ainda estava feito numa …
DAMI-M1 v1.2.0