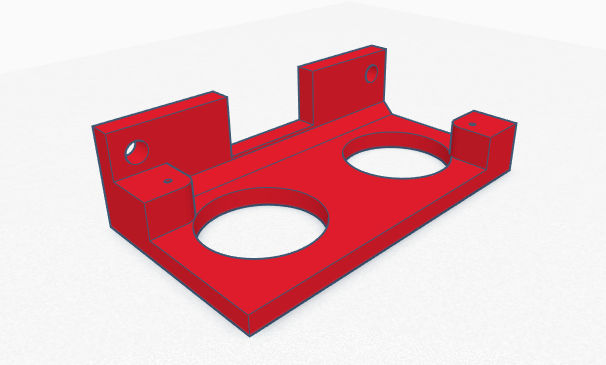
caster-support-108mm-wheel-mod1
Suporte terceira roda esférica para rodas de 108mm

robotic slam
caster-support-108mm-wheel-mod1
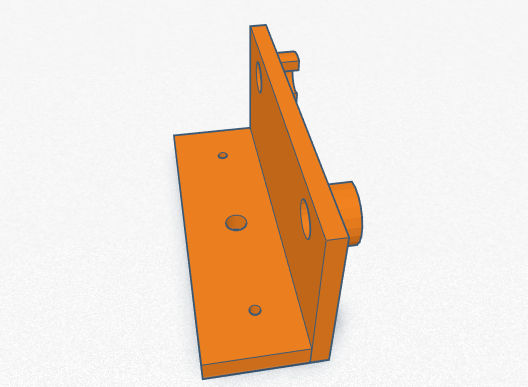
Suporte para aplicar o sonar HC-SR04 a uma base. sonar-sr04-support-mod2
Suporte para VL53L0X não identificado para aplicação no servo SG90. sg90-vl53l0x-mod1

Suporte para VL53L0X da pololu para aplicação no servo SG90 sg90-vl53l0x-pololu-mod1
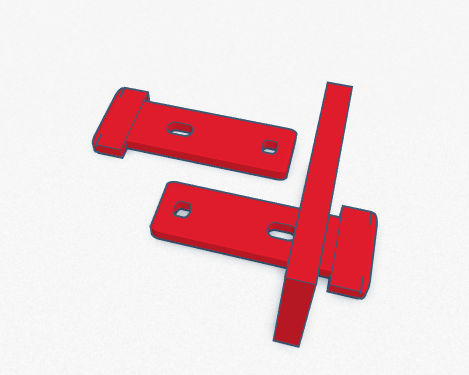
Par de suportes para fixar os motores dc amarelos com encoder sj01. motor-sj01-support-mod1-v1.3
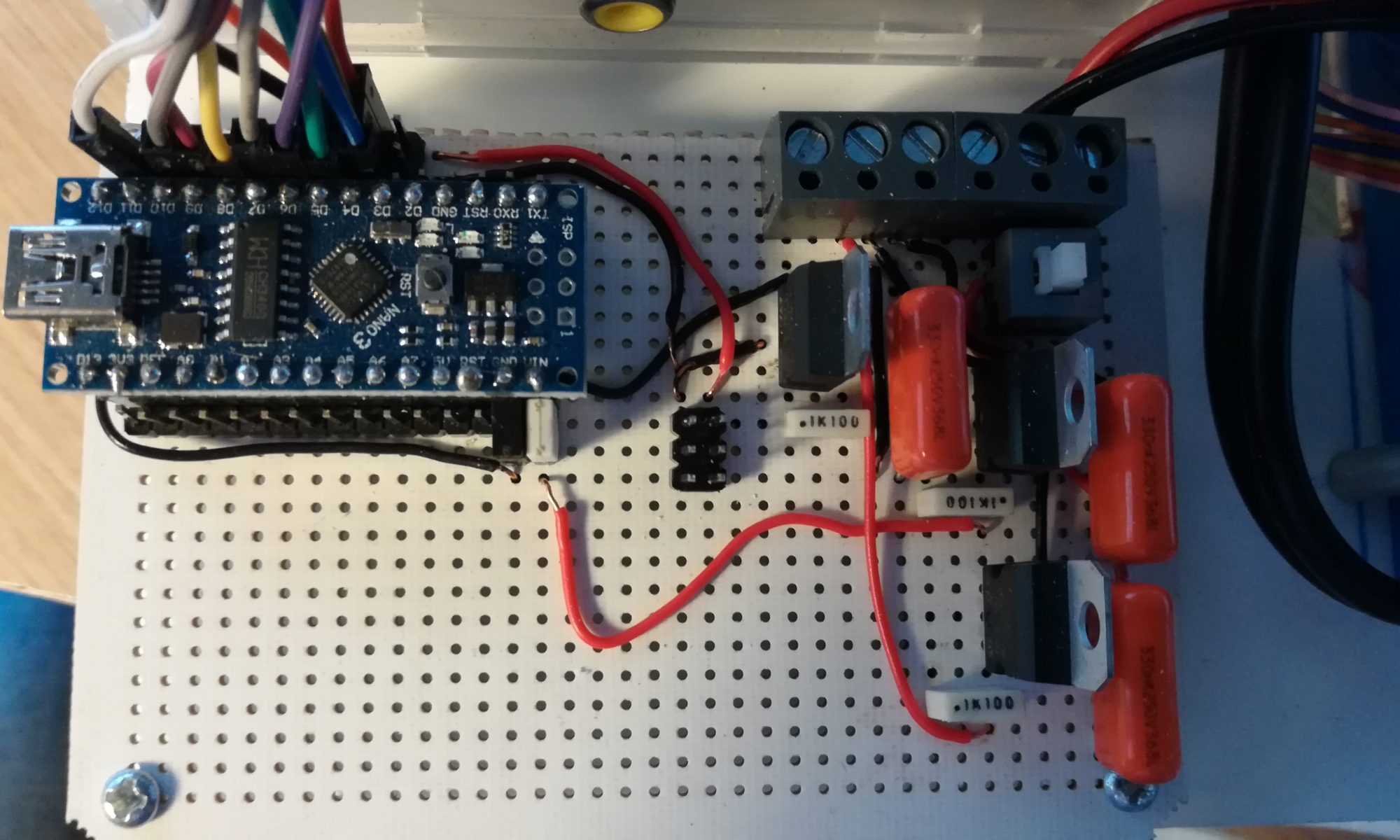
Desenvolvi outra placa principal, esta mais simples e de uso genérico, identificada por BARD-M0 v1.0 com: Circuito de alimentação integrada de 5V, 6V e 8V 1 x entrada (+/-) da tensão de entrada (fios) 2 bancos de pinos de saida tensão 3 x 5V + GND (em linha com pinos digitais do arduino 1) 3 …
Programa demo_2wd_pwm_variable_pid #define serialSpeed 115200 #define bodyLeftMotorPwmRef 110 #define bodyRightMotorPwmRef 130 #define bodySteeringFactor 1 // encoder type #define bodyEncoderSJ01 true #define bodyEncoderHC020K false #define bodyEncoderLM393 false #if bodyEncoderSJ01 #define bodyEncoderSignal CHANGE #define bodyEncoderInputSignal INPUT #endif #if bodyEncoderHC020K #define bodyEncoderSignal FALLING #define bodyEncoderInputSignal INPUT_PULLUP #endif #if bodyEncoderLM393 #define bodyEncoderSignal RISING #define bodyEncoderInputSignal INPUT #endif // …
Continuar a ler “Movimento retilineo de robot 2WD com PWM ajustado por PID”
Programa demo_2wd_pwm_variable_encoders #define serialSpeed 115200 #define bodyLeftMotorPwmRef 110 #define bodyRightMotorPwmRef 130 #define bodyLeftMotorPwmMin 90 #define bodyRightMotorPwmMin 110 #define bodyLeftMotorPwmMax 210 #define bodyRightMotorPwmMax 230 #define steeringFactor 0.9 // encoder type #define bodyEncoderSJ01 true #define bodyEncoderHC020K false #define bodyEncoderLM393 false #if bodyEncoderSJ01 #define bodyEncoderSignal CHANGE #define bodyEncoderInputSignal INPUT #endif #if bodyEncoderHC020K #define bodyEncoderSignal FALLING #define bodyEncoderInputSignal …
Continuar a ler “Encoders no movimento simples de robot 2WD com PWM ajustado”
Programa de demonstração da recolha des dados dos encoders para serem usados postriormente no controlo dos motores. Programa demo_2wd_pwm_fixed_encoders #define serialSpeed 115200 #define bodyLeftMotorPWM 110 #define bodyRightMotorPWM 110 // encoder type #define bodyEncoderSJ01 true #define bodyEncoderHC020K false #define bodyEncoderLM393 false #if bodyEncoderSJ01 #define bodyEncoderSignal CHANGE #define bodyEncoderInputSignal INPUT #endif #if bodyEncoderHC020K #define bodyEncoderSignal FALLING #define …
Continuar a ler “Encoders no movimento simples de robot 2WD com PWM fixo”
Programa de teste simples para fazer um robot 2WD deslocar-se num movimento rectilineo (andar a direito) com um valor fixo de PWM para controlar os dois motores. Material minimo Aos componentes abaixo indicados adicionar: fios, parafusos e porcas. 1 x Chassis para robot 2WD 2 x motores DC 2 x roda 1 x arduino (uno, nano, mega) …
Continuar a ler “Movimento simples de robot 2WD com PWM fixo”