Este artigo documenta a minha experiência na instalação e teste de funcionalidades do RPi.GPIO no Banana Pi M1. RPi.GPIO foi desenvolvido para o Raspberry pi e foi portado para o Banana Pi por outras entidades. O RPi.GPIO permite explorar os pinos GPIO do Banana PI em python3. Para um sumário da instalação do software necessário para …
WiringPi no Banana Pi
O WiringPi (http://wiringpi.com) é uma biblioteca desenvolvida para o Raspberry Pi que permite a utilização dos pinos GPIO disponiveis no RPI. O WiringPi original é exclusivo do RPI, no entanto devido às semelhanças entre os RPI e o BPI, o WiringPi foi também portado para o Banana Pi por outras entidades. Para um sumário da …
VL53L0X no Banana Pi em Python

Este documento dá indicações em como usar o sensor de distancia laser VL53L0X (com o endereço x29) usando o python no Banana Pi M1. Ligações ao VL53L0X Ligue o VL53L0X ao Banana Pi conforme os pinos exibidos na imagem abaixo e de acordo com esquema que se lhe segue: bpi 3.3V > vl53 VCC bpi GND …
MPU6050 no Banana Pi em Python

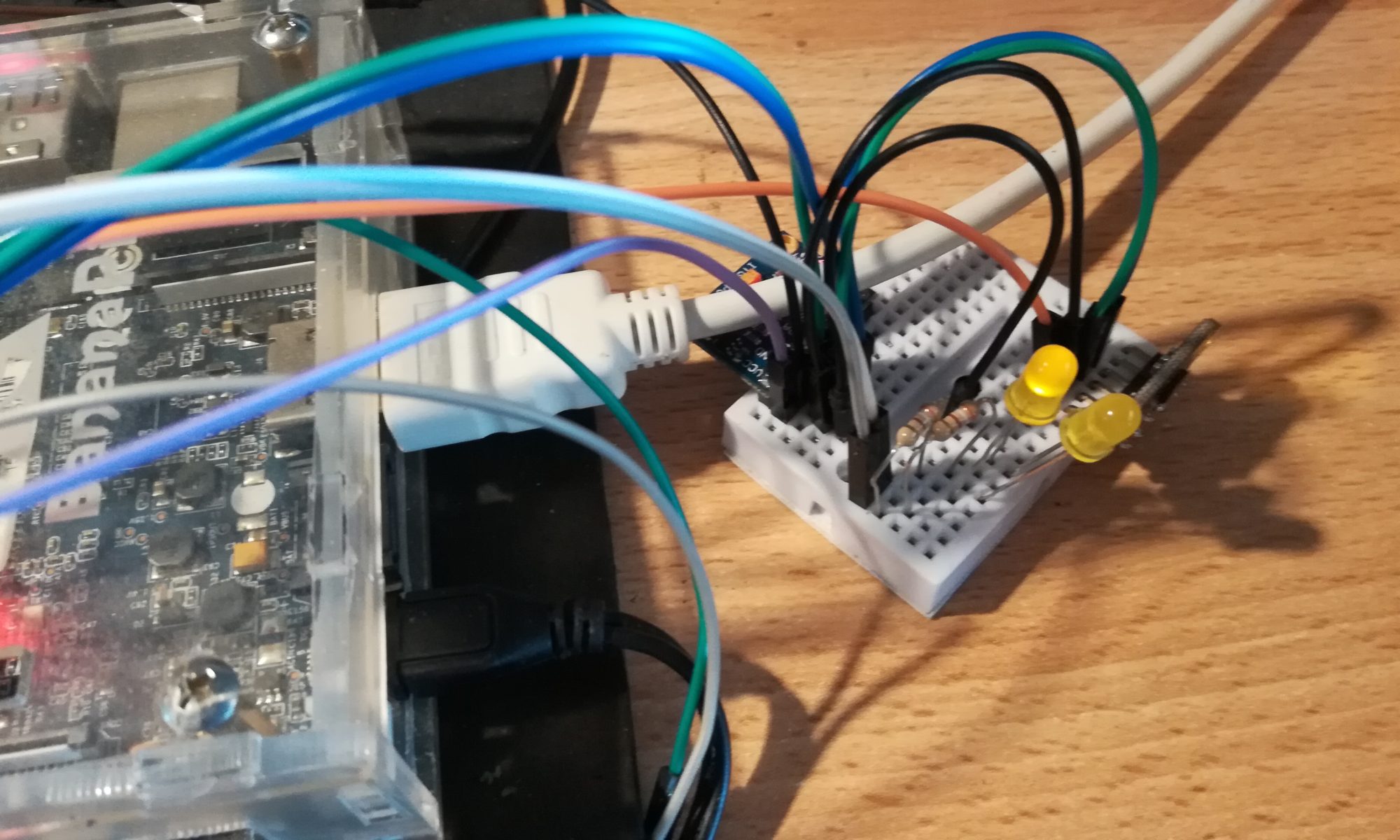
Este documento dá indicações em como aceder ao acelerometro e giroscópio MPU6050 (com o endereço x68) usando o python no Banana Pi M1. Ligações ao MPU6050 Ligue o MPU6050 ao Banana Pi conforme os pinos exibidos na imagem abaixo e de acordo com esquema que se lhe segue: bpi 5V > mpu VCC bpi GND …
Banana Pi i2c
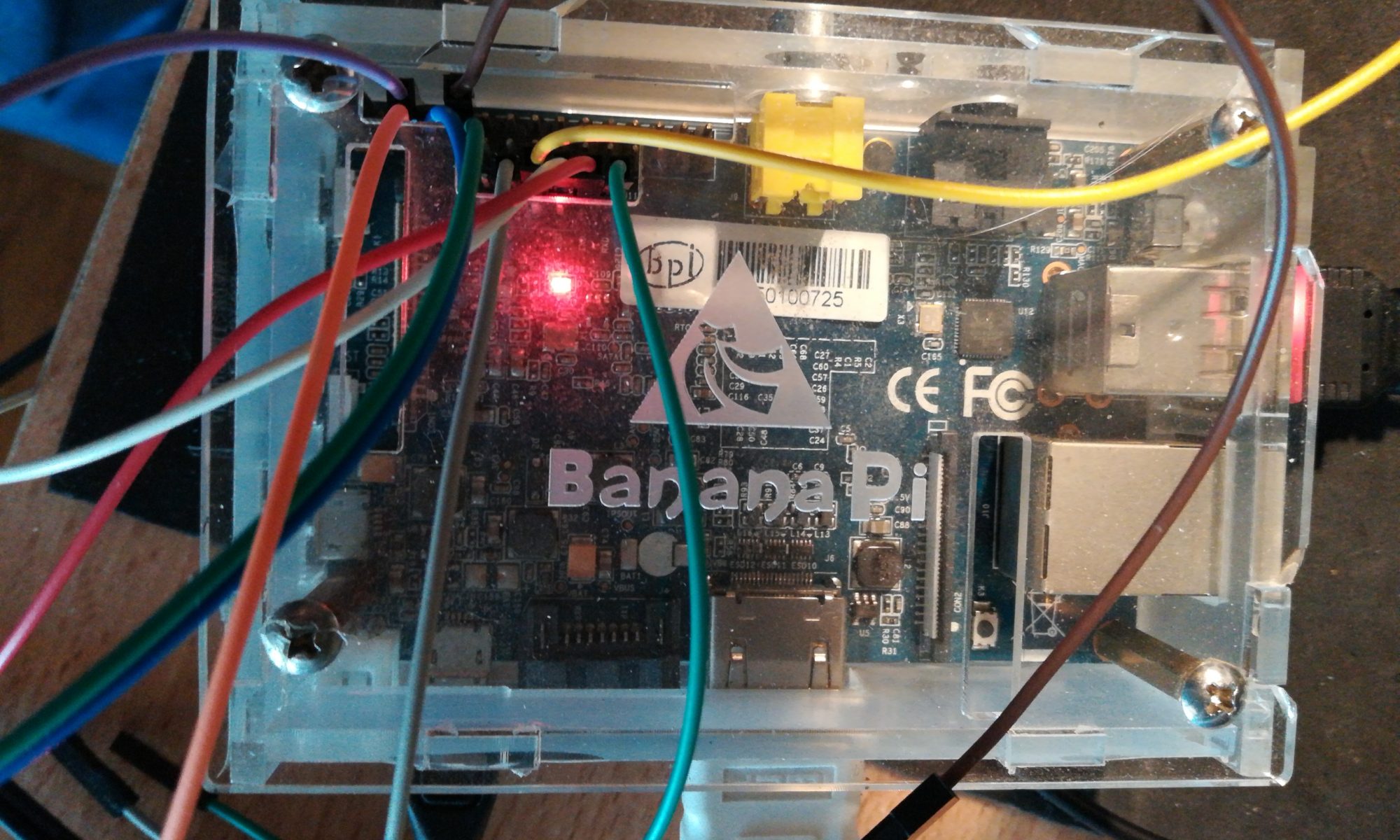
Resultados da primeira exploração do bus i2c no Banana Pi M1, com o debian 9 (armbian), usando um giroscópio e acelerometro MPU6050 como dispositivo de teste. O MPU6050 tem como x68 endereço no bus i2c. Instalação e configuração do bus i2c no Banana pi M1 A instalação e configuração necessária para explorar o bus i2c é …
Teste ao detector IR de chão preto – Microrato 2019

Depois de isolado o código relativo à operação do sistema detector do chão preto (para detectar a marcação de chão do destino) usado no Micro Rato 2018, foi testado, e alterado num pequeno pormenor de ‘estilo’, que não afectou de modo algum o funcionamento anterior. O resultado do primeiro teste está ilustrado no video acima, …
Continuar a ler “Teste ao detector IR de chão preto – Microrato 2019”
Teste ao detector de torre de IR – Microrato 2019
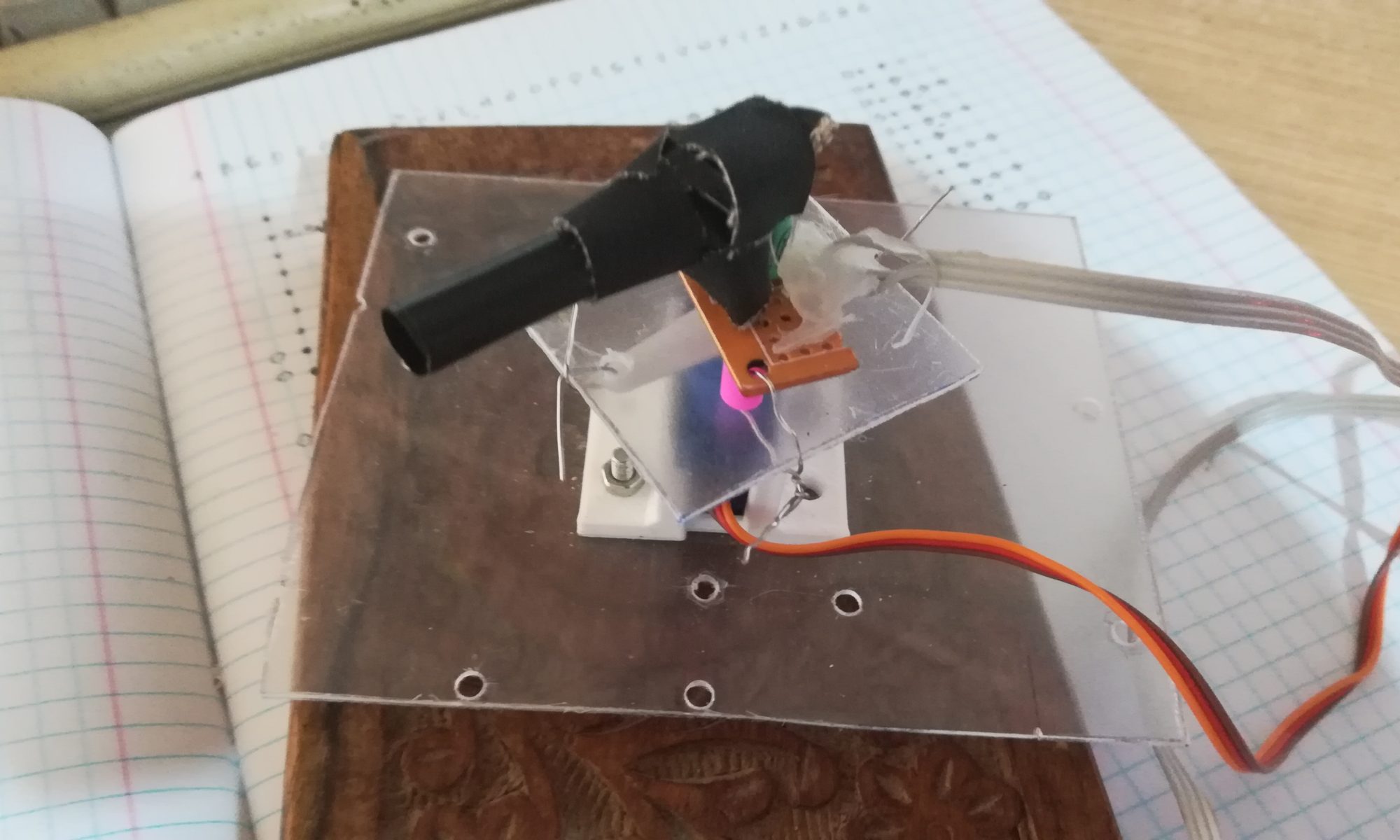
Video do último teste básico ao sistema de detecção de IR (as várias colunas são uma tabela de frequências do ângulo detectado; no final do artigo encontra-se a foto da tabela de frequências final deste teste). Depois de isolado o código relativo à operação do sistema detector da torre IR usado no Micro Rato 2018, …
Continuar a ler “Teste ao detector de torre de IR – Microrato 2019”
Proposta de pré-prototipo de Robot para o Micro Rato 2019

Como base de trabalho foi elaborado um robot simples, efectuado com os motores do DAMI-M4, os suportes triplos de sonares do DAMI-M2, uma placa controladora de motores (Arduino Nano + L293D), e um arduino Mega 2560, a correrem os programas desenvolvidos para o DAMI-M4. O programa base limita-se a evitar obstáculos. Este prototipo foi …
Continuar a ler “Proposta de pré-prototipo de Robot para o Micro Rato 2019”
Sistema com micro-controlador dedicado à gestão e controlo de motores (v1)
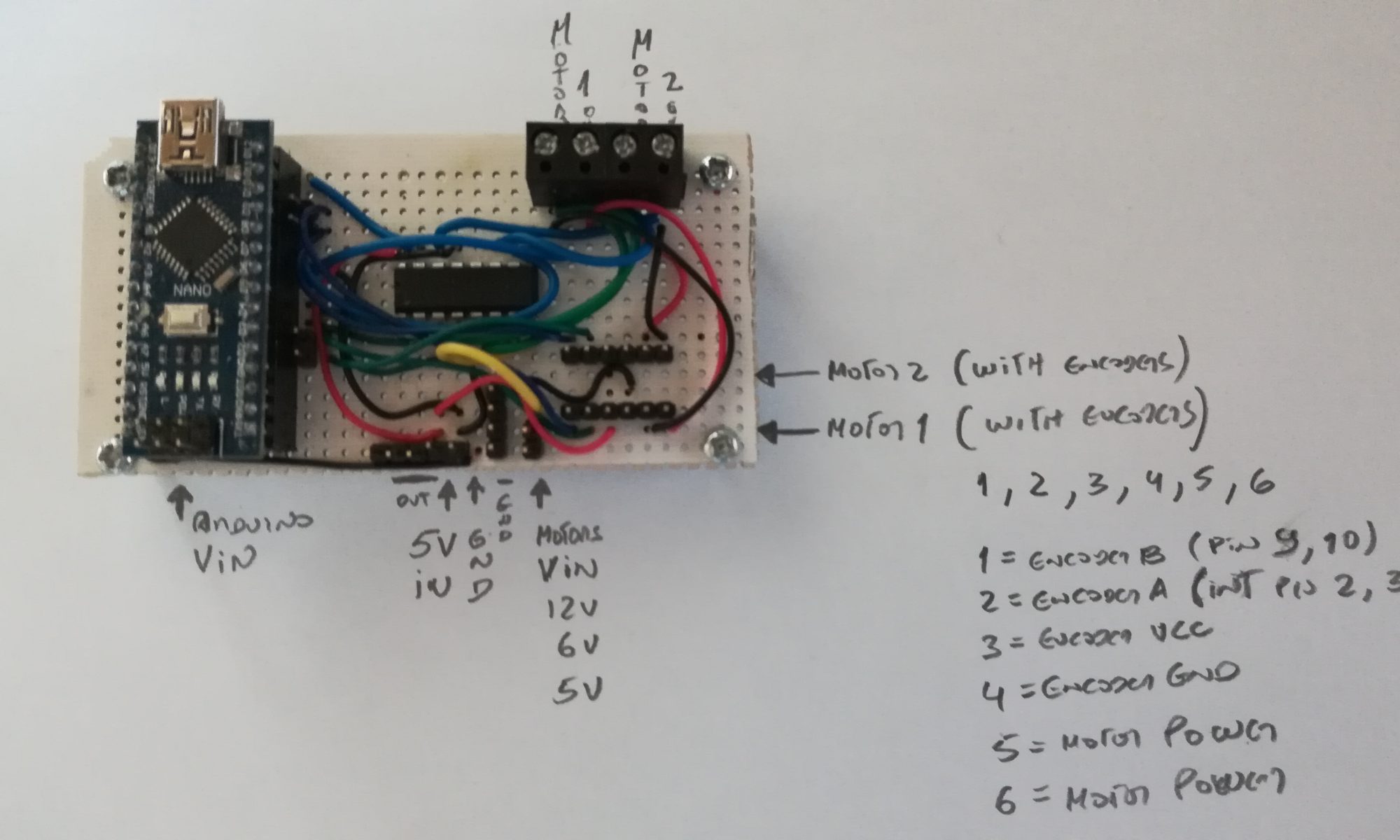
Primeira versão da placa com um micro-controlador Arduino e uma ponte-H L293D dedicado à gestão de motores (v1) usada num pré-prototipo para o robot Micro Rato 2019 da equipa Sound Rat. Esta placa foi um reaproveitamento de uma antiga placa (BARD) utilizada no DAMI-M2 v1.0.0. A placa foi dividida ao meio, separando a área da alimentação do …
Continuar a ler “Sistema com micro-controlador dedicado à gestão e controlo de motores (v1)”
Robot Micro Rato 2019

A comunidade de makers que se reúne semanalmente no radiomaker.space inscreveu a equipa Sound Rat com 3 elementos para participar na prova Maze Runner da competição Micro Rato 2019 – UA, a realizar no dia 15 de Maio de 2019, na Universidade de Aveiro. Na medida das possibilidades, irei documentar as diversas fases do desenvolvimento …