test_ULN2003_lib_stepper_basic1
Rotação em ambos os sentidos usando a library Stepper.
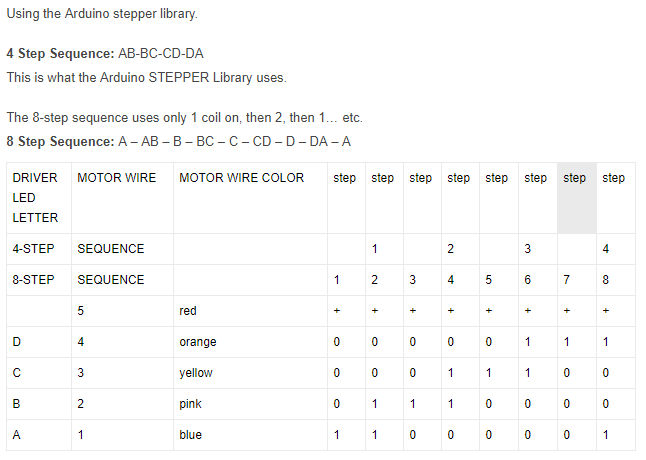
A biblioteca Stepper está pré instalada no Arduino IDE.
arduino D8 / Blue – ULN2003 pin 1
arduino D9 / Pink – ULN2003 pin 2
arduino D10 / Yellow – ULN2003 pin 3
arduino D11 / Orange – ULN2003 pin 4
#include <Stepper.h>
// Number of steps per revolution of INTERNAL motor in 4-step mode
#define STEPS_PER_MOTOR_REVOLUTION 32
// Number of steps per revolution of OUTPUT SHAFT (= gear reduction; 2048 steps)
#define STEPS_PER_OUTPUT_REVOLUTION 32 * 64
// Declare 'small_stepper' variable
Stepper small_stepper(STEPS_PER_MOTOR_REVOLUTION, 8, 10, 9, 11);
// Declare 'Steps2Take' variable
int Steps2Take;
void setup()
{
// Nothing (Stepper Library sets pins as outputs)
}
void loop()
{
small_stepper.setSpeed(5); // SLOWLY Show the 4 step sequence
Steps2Take = 20; // Rotate CW
small_stepper.step(Steps2Take);
delay(2000);
Steps2Take = STEPS_PER_OUTPUT_REVOLUTION / 2; // Rotate CW 1/2 turn
small_stepper.setSpeed(500);
small_stepper.step(Steps2Take);
delay(1000);
Steps2Take = - STEPS_PER_OUTPUT_REVOLUTION / 2; // Rotate CCW 1/2 turn
small_stepper.setSpeed(1000); // 2000 a good max speed??
small_stepper.step(Steps2Take);
delay(2000);
}