
Como base de trabalho foi elaborado um robot simples, efectuado com os motores do DAMI-M4, os suportes triplos de sonares do DAMI-M2, uma placa controladora de motores (Arduino Nano + L293D), e um arduino Mega 2560, a correrem os programas desenvolvidos para o DAMI-M4. O programa base limita-se a evitar obstáculos.
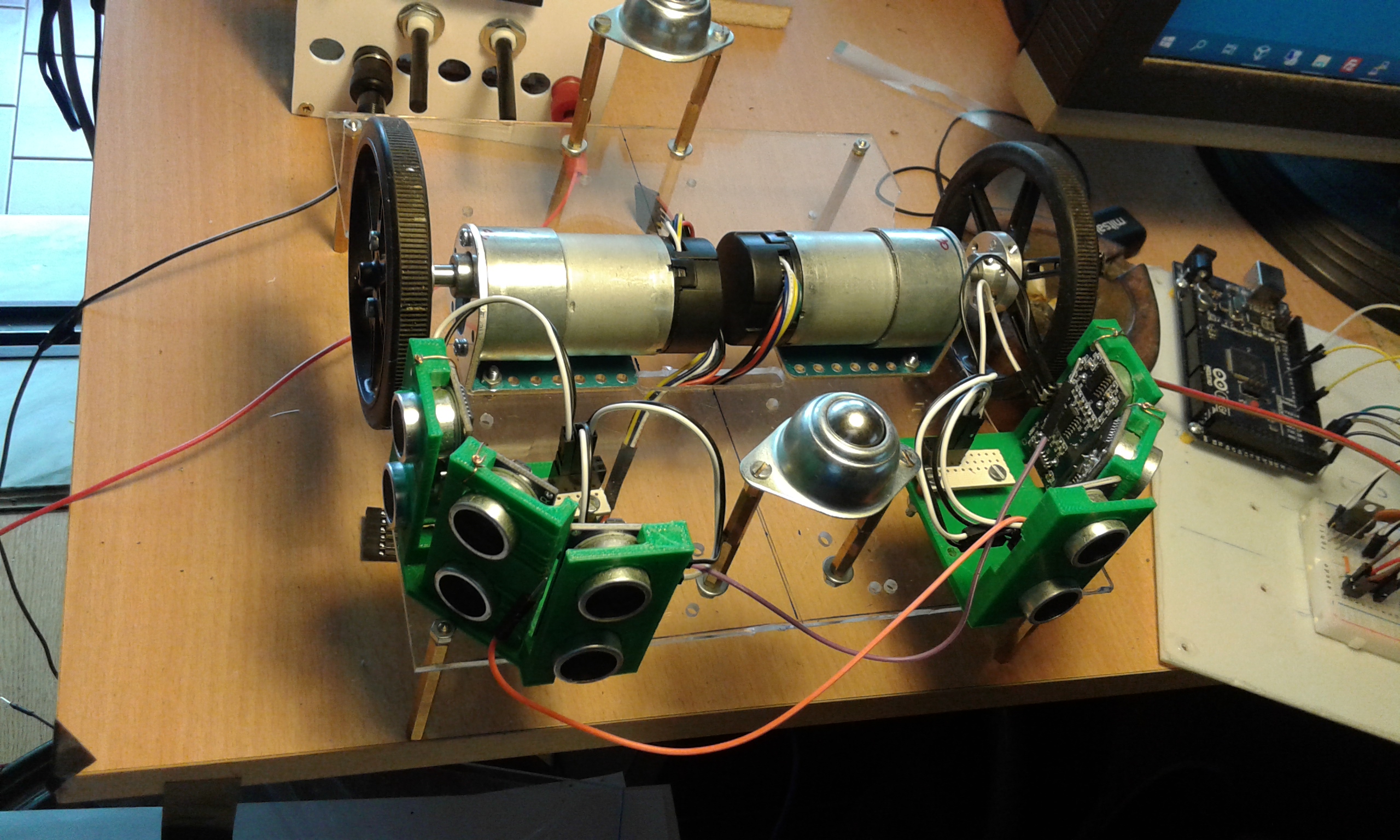
Este prototipo foi apresentado na 1º Sessão Maker dedicada ao micro rato realizada em 2019-04-27.