Robot 2WD ROSPIBOT
O meu primeiro protótipo de Robot 2WD com o ROS foi construído com base na plataforma do M2, sonares SR-04 e um mpu6050.
Abandonei o projecto (pelo menos temporariamente) para experimentar uma plataforma com um lidar rudimentar feito com um servo SG90 e um sensor laser VL53L0X. Este projecto foi também interrompido porque entretanto recebi um lidar Neato XV-11 e dei inicio a um novo projecto em que o robot fizesse uso do XV-11.
Após algum tempo consegui lá consegui montar uma base estável, (sem que o mpu6050 desse problemas de maior) para o robot em ROS.
Nessa base instalei e configurei o software descrito nos seguintes links.
http://wiki.ros.org/gmapping
http://wiki.ros.org/navigation/Tutorials/RobotSetup
Com estes programas consegui executar o primeiro mapa aceitável de parte da casa.

Diria que está atingido o primeiro objectivo do projecto original (de a cerca de um ano e 4 meses atrás). Ter um robot capaz de construir um mapa do ambiente.
Robot 2WD DAMI-M3
Robot 2WD de propulsão diferencial baseada em motores de passos, com dois microcontroladores Arduino, dois sensores de distancia ultra sons e um laser montado num servo SG90, e ainda um transciver de2.4GHz nRF24L01 para comunicação dos dados da odometria e sensores de distãncia para uma base, assim como para a recepção de comandos remotos simples.

Este robot está em desenvolvimento que pode ser seguido na área dedicada ao DAMI-M3. Também pode consultar a lista de coisas a fazer neste robot.
Robot 2WD DAMI-M4
Robot 2WD de propulsão diferencial baseada em motores DC, com dois microcontroladores Arduino, quatro sensores de distancia ultra sons e um Raspberry Pi pi para comunicação dos dados da odometria e sensores de distãncia para uma base, assim como para a recepção de comandos remotos simples.
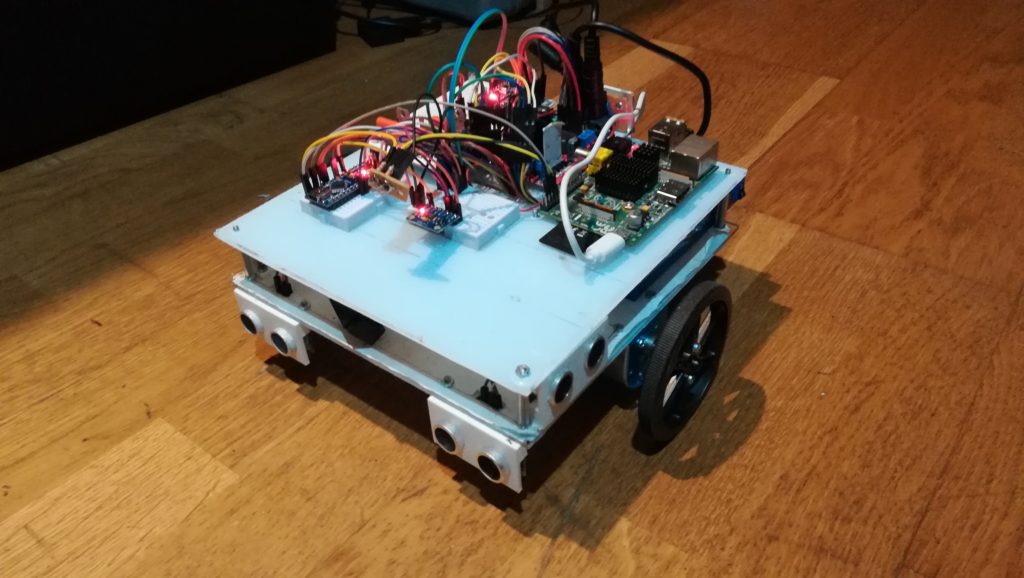
Este robot está no inicio da sua construção. O seu desenvolvimento que pode ser seguido na área dedicada ao DAMI-M4. Também pode consultar a lista de coisas a fazer neste robot.